
SEGA Confidential
General Notice
When using this document, keep the following in mind:
1. This document is confidential. By accepting this document you acknowledge that you are bound
by the terms set forth in the non-disclosure and confidentiality agreement signed separately and /in
the possession of SEGA. If you have not signed such a non-disclosure agreement, please contact
SEGA immediately and return this document to SEGA.
2. This document may include technical inaccuracies or typographical errors. Changes are periodi-
cally made to the information herein; these changes will be incorporated in new versions of the
document. SEGA may make improvements and/or changes in the product(s) and/or the
program(s) described in this document at any time.
3. No one is permitted to reproduce or duplicate, in any form, the whole or part of this document
without SEGA'S written permission. Request for copies of this document and for technical
information about SEGA products must be made to your authorized SEGA Technical Services
representative.
4. No license is granted by implication or otherwise under any patents, copyrights, trademarks, or
other intellectual property rights of SEGA Enterprises, Ltd., SEGA of America, Inc., or any third
party.
5. Software, circuitry, and other examples described herein are meant merely to indicate the character-
istics and performance of SEGA's products. SEGA assumes no responsibility for any intellectual
property claims or other problems that may result from applications based on the examples
describe herein.
6. It is possible that this document may contain reference to, or information about, SEGA products
(development hardware/software) or services that are not provided in countries other than Japan.
Such references/information must not be construed to mean that SEGA intends to provide such
SEGA products or services in countries other than Japan. Any reference of a SEGA licensed prod-
uct/program in this document is not intended to state or simply that you can use only SEGA's
licensed products/programs. Any functionally equivalent hardware/software can be used instead.
7. SEGA will not be held responsible for any damage to the user that may result from accidents or any
other reasons during operation of the user's equipment, or programs according to this document.
(6/27/95- 002)
NOTE: A reader's comment/correction form is provided with this
document. Please address comments to :
SEGA of America, Inc., Developer Technical Support (att. Evelyn Merritt)
150 Shoreline Drive, Redwood City, CA 94065
SEGA may use or distribute whatever information you supply in any way
it believes appropriate without incurring any obligation to you.
|

SEGA Confidential
TM
SATURN
System Library
User's Guide
ver. 1.0
Doc. # ST-162-R1-092994
© 1994-95 SEGA. All Rights Reserved.
|

SEGA Confidential
READER CORRECTION/COMMENT SHEET
Chpt.
pg. #
Correction
Corrections:
General Information:
Your Name
Phone
Document number
ST-162-R1-092994
Date
Document name
Saturn System Library User's Guide, ver. 1.0
Questions/comments:
Keep us updated!
If you should come across any incorrect or outdated information while reading through the attached
document, or come up with any questions or comments, please let us know so that we can make the
required changes in subsequent revisions. Simply fill out all information below and return this form to
the Developer Technical Support Manager at the address below. Please make more copies of this form if
more space is needed. Thank you.
Where to send your corrections:
Fax:
(415) 802-1717
Attn: Evelyn Merritt,
Developer Technical Support
Mail:
SEGA OF AMERICA
Attn: Evelyn Merritt,
Developer Technical Support
150 Shoreline Dr.
Redwood City, CA 94065
|

SEGA Confidential
REFERENCES
In translating/creating this document, certain technical words and/or phrases were interpreted
with the assistance of the technical literature listed below.
1.
KenKyusha New Japanese-English Dictionary
1974 Edition
2.
Nelson's Japanese-English Character Dictionary
2nd revised version
3.
Microsoft Computer Dictionary
4.
Japanese-English Computer Terms Dictionary
Nichigai Associates
4th version
|

SEGA Confidential
Table of Contents
SYSTEM PROGRAM USER'S MANUAL .................................................... 1
1.0
GUIDE ............................................................................................... 1
1.1
Explanation .............................................................................. 1
2.0
REFERENCE .................................................................................... 7
2.1
List of Functions ...................................................................... 7
2.2
Function Specifications ............................................................ 8
SMPC I/F USER'S MANUAL .................................................................... 15
1.0
GUIDE ............................................................................................. 15
2.0
FEATURES ..................................................................................... 15
3.0
OVERVIEW ..................................................................................... 16
3.1
Function Overview ................................................................. 16
3.2
Process Overview .................................................................. 16
4.0
DETAILS ......................................................................................... 17
4.1
Functions ............................................................................... 17
4.2
Process ................................................................................. 18
4.3
Peripheral Control .................................................................. 22
5.0
CALLING SEQUENCE .................................................................... 23
6.0
DATA SPECIFICATIONS ................................................................. 24
6.1
List of Data ............................................................................ 24
6.2
Data Specifications ................................................................ 25
7.0
FUNCTION SPECIFICATIONS ....................................................... 33
7.1
List of Functions .................................................................... 33
7.2
Function Specifications .......................................................... 33
BACKUP LIBRARY USER'S MANUAL ..................................................... 39
1.0
Guide .............................................................................................. 39
1.1
Purpose ................................................................................. 39
1.2
Explanation ............................................................................ 39
1.3
Program Example .................................................................. 40
2.0
Reference........................................................................................ 41
2.1
Data List ................................................................................ 41
2.2
Function List .......................................................................... 42
2.3
Data Flow .............................................................................. 43
2.4
Function Specification ........................................................... 43
|

SEGA Confidential
Saturn System Library User's Guide
1
System Program User's Manual
1.0
Guide
1.1 Explanation
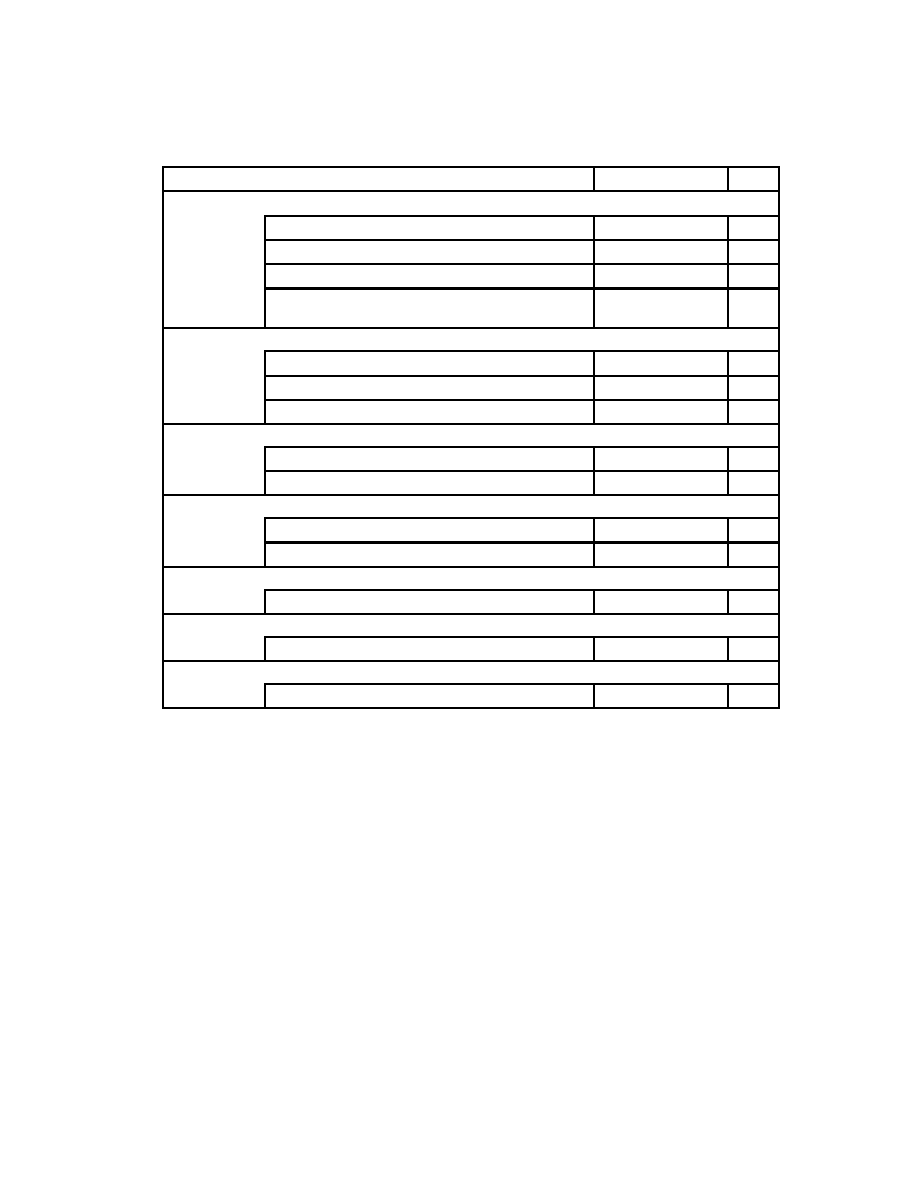
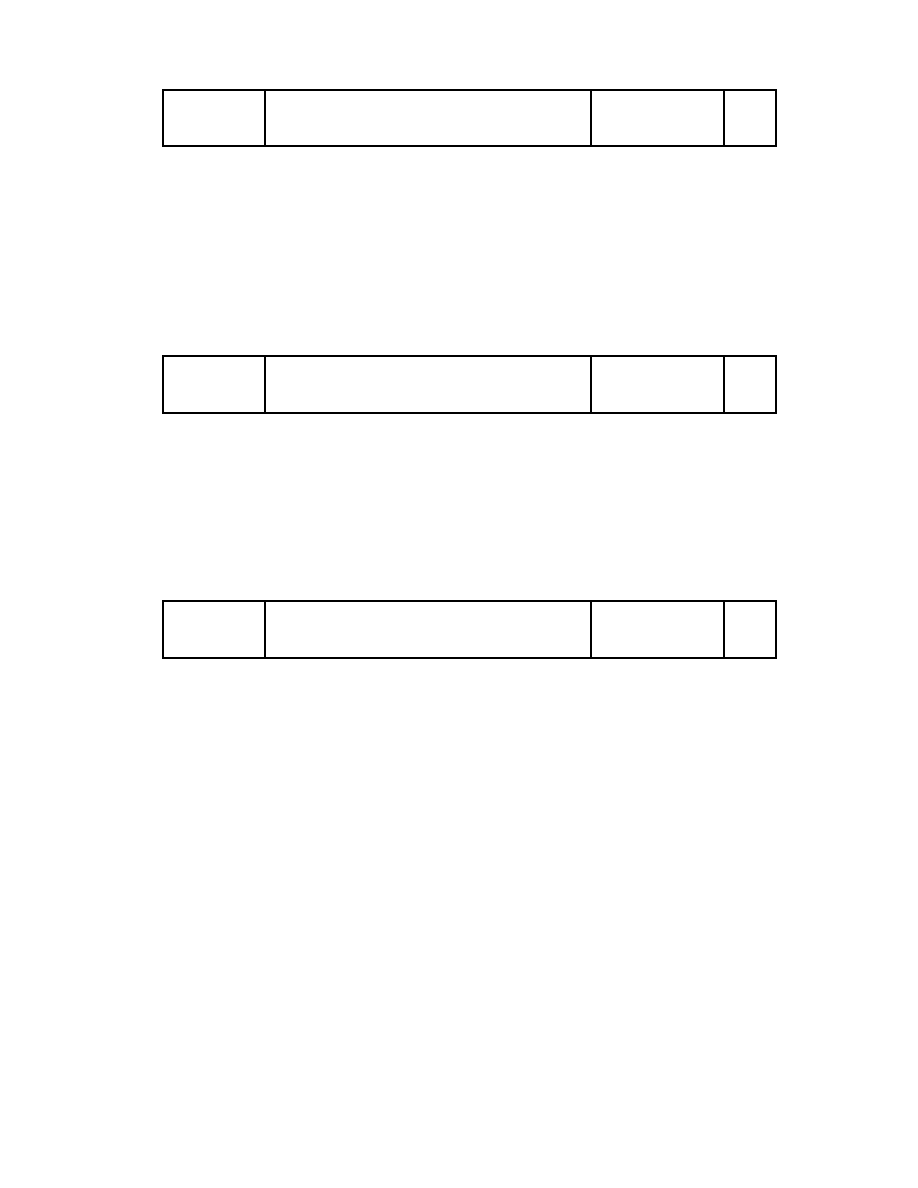
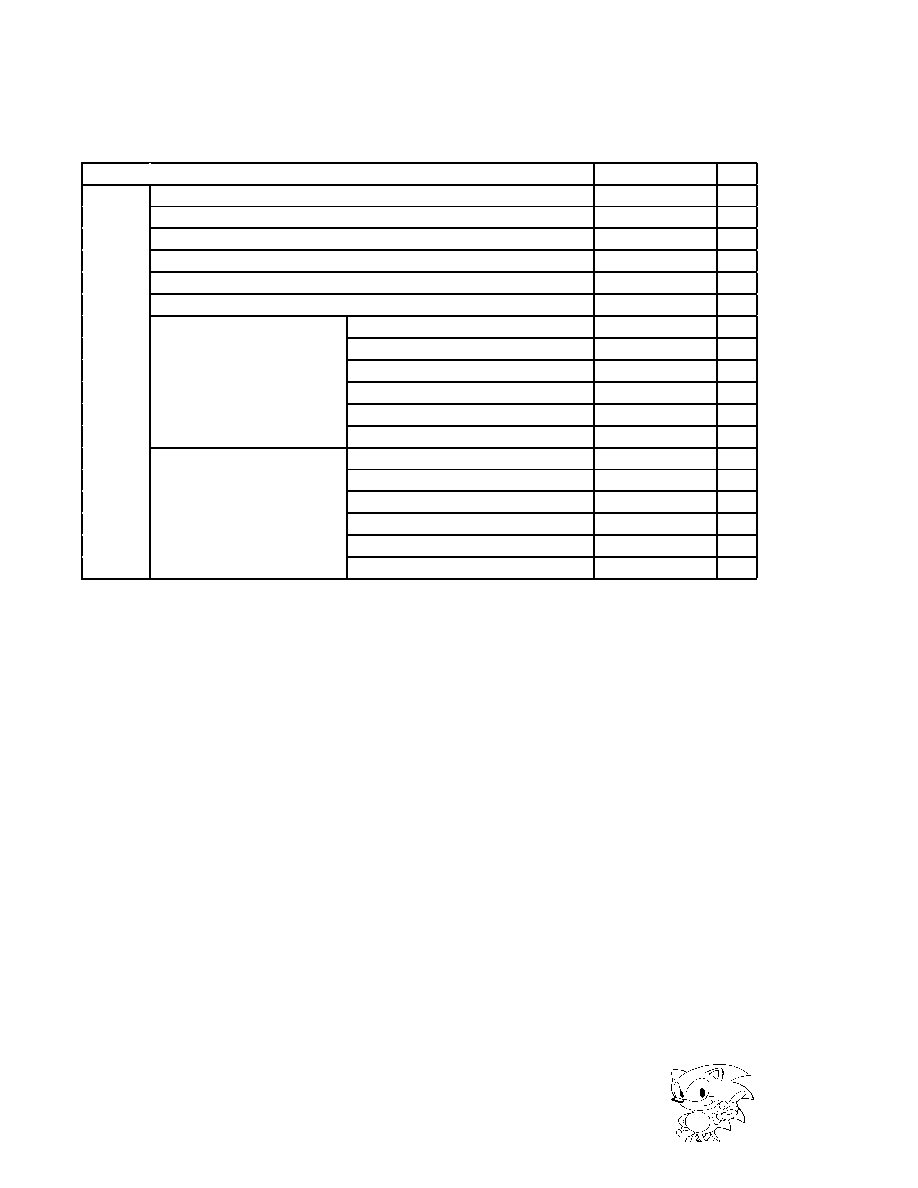
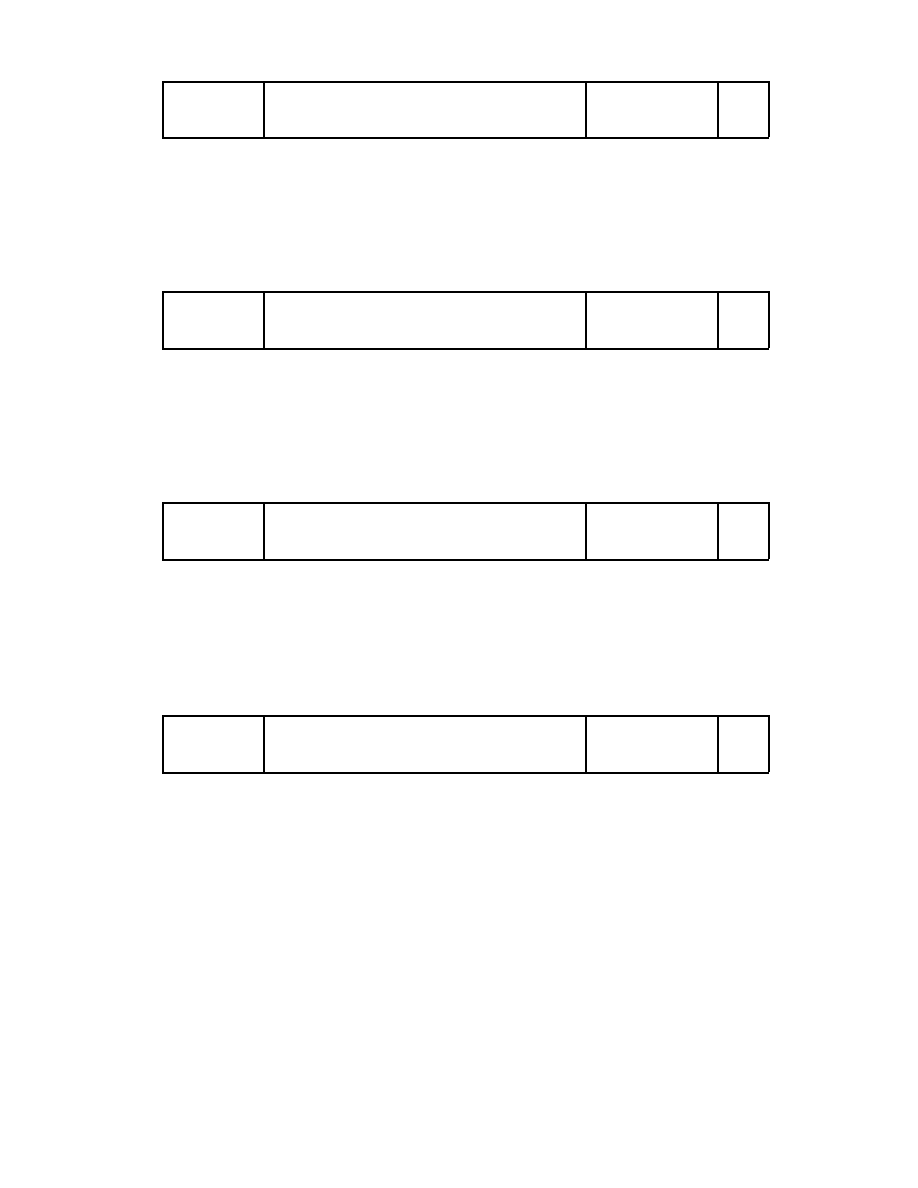
Interrupt Process Routine Registration and Reference Operations
After booting up from the boot ROM, the master SH2 interrupt vector table is at the
beginning of the work RAM, and the VBR (vector base register) indicates this ad-
dress.
The slave SH2 interrupt vector table is the work RAM lead + 400H, and the slave
SH2 VBR indicates that address. The interrupt vector (programmable) of every
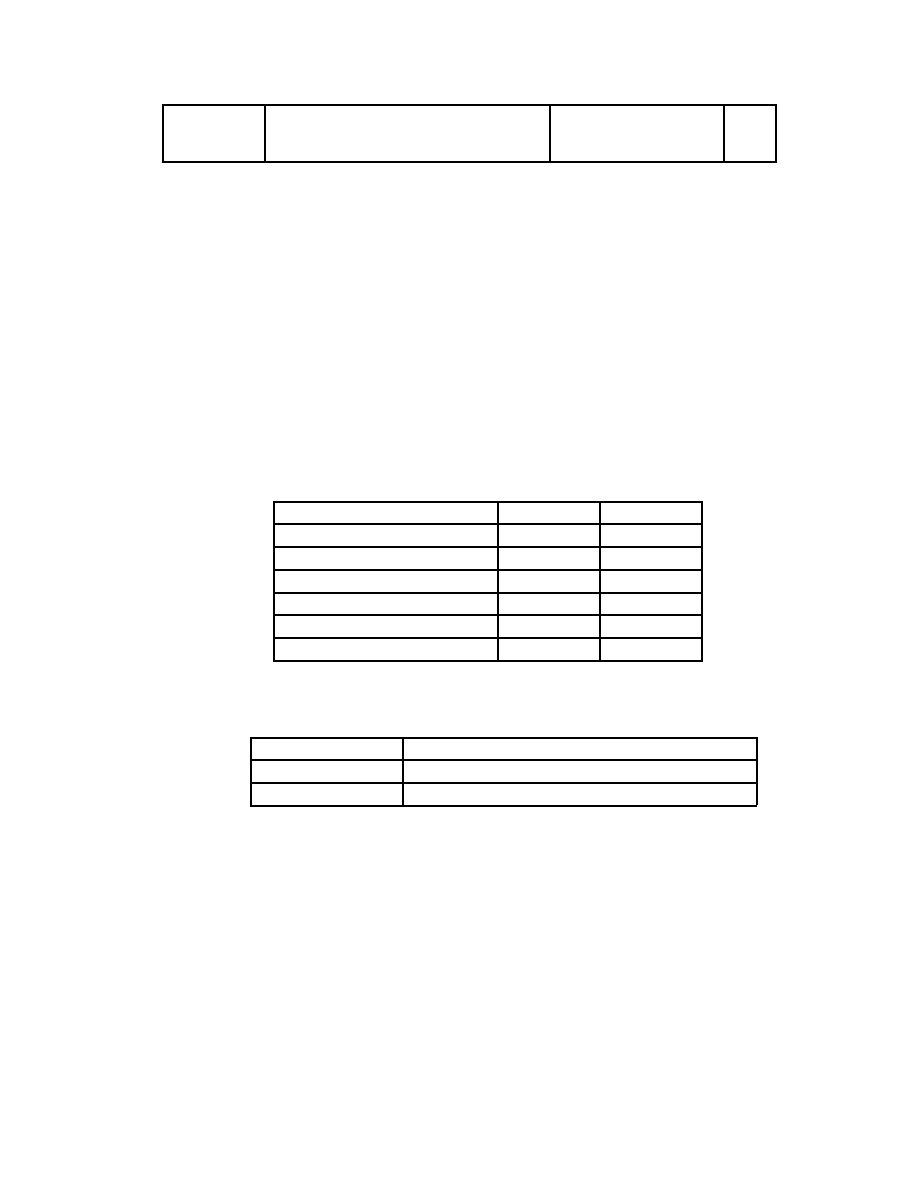
built-in SH2 module is assigned by the initial settings in the table below. Dummy
routines that do nothing are set in the vector table. (With the exception of invalid
commands and address errors, these are infinite loops.)
The FRT input capture interrupt is assigned for use in master and slave communica-
tions, and its initial priority is 15 (highest priority). In the table below, the priority of
all interrupts, except for the FRT input capture interrupt, is set at 0 and interrupt is
unauthorized.
In changing the priority of the built-in module interrupts, the content of the inter-
rupt control register must change in response to the needs of the application.
* for slave > master passing
* for master > slave passing
* * IRL2, IRL6 level interrupts
Master SH2 Vector Initial Settings
Slave SH2 Vector Initial Settings
40H ~ SCU interrupt vector
41H H-Blank In * *
5FH (set by hardware)
43H V-Blank In
60H SCI receive error
60H SCI receive error
61H SCI receive buffer full
61H SCI receive buffer full
62H SCI send buffer empty
62H SCI send buffer empty
63H SCI send quit
63H SCI send quit
* 64H FRT input capture
* 64H FRT input capture
65H FRT compare match
65H FRT compare match
66H FRT overflow
66H FRT overflow
67H Free
67H free
68H WDT interval
68H WDT interval
69H BSC compare match
69H BSC compare match
6AH Free
6AH Free
6BH Free
6BH Free
6CH DMACH1 (SH2 built-in)
6CH DMACH1 (SH2 built-in)
6DH DMACH0 (SH2 built-in)
6DH DMA CH0 (SH2 built-in)
6EH DIVU (division)
6EH DIVU (division)
6FH Free
6FH Free
|

SEGA Confidential
2
This operation routine should be used to register the interrupt process routine to the
interrupt vector and to reference the address of the current process routine. Further-
more, a SCU interrupt routine (the master SCU interrupt) that implements the inter-
rupt process via a format that subroutine calls the C function is provided. The C
function can be registered there and the registration address can also be referenced.
The function registered in the SCU interrupt routine is called whenever interrupt
occurs. Before and after this call, register save and return are performed per register
retention (save) protocol of the SHC compiler. If the routine is one that complies
with the C function or that protocol, it can be registered and processed. If a separate
interrupt process routine is registered in the SCU interrupt vector, the SCU interrupt
process routine is bypassed and becomes invalid. However, it may not be suitable
for an interrupt process requiring a rapid response such as HBlank.
SCU Interrupt Mask Set, Reference, and Change Operations
Because this register cannot be read, the mask value set to the SCU interrupt mask
register cannot perform computation against the actually set values when changes,
etc. are implemented. Therefore, this value is stored separately in memory and a
service routine, which preserves and updates in consistency with the actual SCU
interrupt mask register, is provided.
When this routine is used, setting and changing the SCU interrupt mask must al-
ways be done by the library and application through these functions. After the SCU
interrupt mask register is set and changed, the SCU interrupt status register, and if
necessary, the A-Bus interrupt acknowledge register, are cleared.
Simple Semaphore Operation
A service is available that enables memory (256 bytes) provided by the Boot ROM to
be used as 256 bytes of simple semaphore. The first half (numbers 0 ~ 127) of sema-
phore can be used in any way. The second half (128 ~ 255) is used in operations
related to the library. When the library uses a specific function such as DMA, it sets
semaphore MSB(80H) to 1 and shows that it is in use. After that, it clears MSB and
shows that it is free.
In a process that requires resources to be secured over a comparatively long period
of time, the semaphore operation and reference procedure should be determined so
that those resources are not accessed arbitrarily by an interrupt process during that
period of time.
The SH2 TAS command is used when setting MSB for semaphore memory. This
command allows only one process to reliably acquire semaphore since execution is
indivisible (bus control [authorization] is not cleared). This must be cleared when
the process that acquired semaphore is completed. All semaphore memory is
cleared when reset.
|

SEGA Confidential
Saturn System Library User's Guide
3
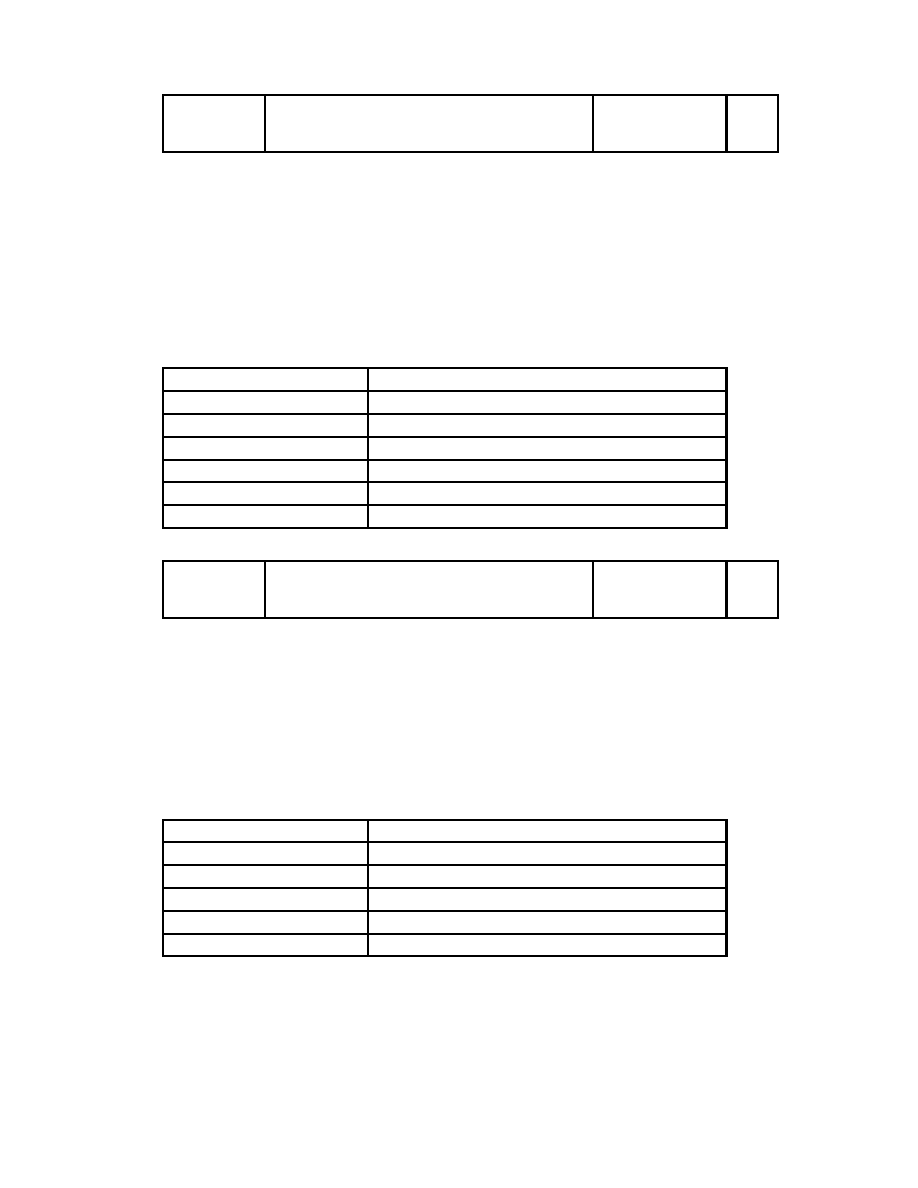
System Clock Switching
System clock switching cannot be performed by issuing independent commands to
the SMPC. Use of this system program is required. System clock switching entails a
partial hardware reset.
CPU Clock
26 MHz
28 MHz
Horizontal Resolution
320/640
352/704
Reset Devices
OFF or non guaranteed Devices
Unaffected Devices
SCU
Slave SH (OFF)
Master SH * note
VDP1
DRAM (previous content destroyed)
SDRAM
VDP2
SCSP (OFF)
CD
SCSI/SCC
(development devices only)
SIMM
(development devices only)
* Note Because master SH is in the standby mode during clock switching, of the built-in SH modules,
the FRT and the SCI within the SH must be reset. WDT is used during this process.
NMI goes to its existed status after the process; for example, the DMAC control goes to inter-
rupt status by NMI. See the SH manual. If necessary, perform the reopen process.
Reinitializing process after reset:
SCU:
Reinitializes the bus, interrupt mask, etc. However, the value of
SYS_GETSCUIM is used for the interrupt mask value.
Postprocesses required with applications:
VDP2:
The TV mode must be set comparatively fast. Because the 320/640 mode is
used after the device itself is reset, especially when the system clock is
changed to the 352/704 mode, the synchronous signal shifts in the TV and
turbulence occurs on the screen.
VDP1, 2, SCSP:
All previous settings are invalid. Must be reset.
SMPC:
Hot reset must be enabled.
The clock change process time is about 110 ms, which includes the reset time of the
device.
|
SEGA Confidential
4
SCU Interrupt Routine Priority Change
The Boot ROM has an interrupt priority control table used for the SCU interrupt
process service, making rewrite possible.
Note:
This is a risky service. The system may hang up if priority relationship inconsistencies
exist in the table contents.
With this, the interrupt process (items using SYS_SETUINT) can be optimized in the
application.
To use this, prepare the same structural data for the application as the table, and call
SYS_CHGUIPR.
Tables are of 32 long words. 1 long word has the following contents.
The value set to SR at the beginning
ORed with the current mask set value
of the interrupt process
and written to the SCU interrupt mask
register at the beginning of the interrupt
process.
This long word position inside the table corresponds to the SCU 30 interrupt factor.
(V-Blank In is the start and V-Blank Out is the 2nd,...but 2 long word spaces that
correspond to vectors 4EH and 4FH are included.)
Tables must be created very carefully so that there is no inconsistency between the
SR, SCU interrupt mask, and interrupt factor.
For example, the Boot ROM uses the following table for its initial set values:
Uint32 PRITab[32] = {
0x00F0FFFF,
/* VBI
SR=15
All prohibited (highest priority) */
0x00E0FFFE,
/* VBO
SR=14
Only VBI is allowed
*/
0x00D0FFFF,
/* HBI
SR=13
VBI and VBO are allowed
*/
.
.
0x0070FE00,
/* External 15
SR=7
SCU interrupt unique priority;
all masked when 7 or less. */
/* A bus interrupt unique priority that assumes 7, 4,and
1 by cause factor, but because
of the common use and 1 bit
mask, it is set to 7.
*/
} ;
SH2 SR insignificant word value
SCU interrupt mask insignificant word value
|

SEGA Confidential
Saturn System Library User's Guide
5
The creation example shown is one in which the SR value is always set to 0, and
priorities are described only using SCU mask values (priority relationship). Here,
SH always receives an interrupt and only the SCU mask controls authorization and
prohibition.
Uint32 PRITab[32] = {
0x0000FFF9,
/* during VBI process HBI and VBO authorization
*/
0x0000FFFB,
/* during VBO process only HBI authorization
*/
0x00D0FFFC,
/* during HBI process all prohibited (highest priority)
*/
.
.
0x00000000,
/* during external 15 process, all authorized (lowest priority) */
} ;
The inverse of the example above is prohibiting mask interrupt at SR value levels without
changing the SCU mask value. (0 or 15 only are possible.)
In the example above, the interrupt authorize and prohibit register of each built-in
module must also be operated for SH internal module interrupt authorization and
prohibition.
Note:
When the SCU factor interrupt is allowed and interrupt occurs, it is okay if the SH SR mask is
higher than the interrupt unique level (value decided by SCU hardware) and if interrupt can
never be refused by SH. (However, one exception is that all of SR mask 15 can be prohibited.)
CD Multiplayer Startup Execution
This is a service that activates and executes the CD multiplayer when an application
ends. When this service is called, the CD multiplayer screen is displayed exactly the
same as when the power-on sequence is activated. Regardless of the called status,
the CD multiplayer screen is displayed and operation is enabled.
Power On Clear Memory Operation
This provides the 8 bytes of memory on the SDRAM controlled by the Boot ROM.
The 8 bytes are initialized to 0 when power-on is activated, but the contents can be
saved with the reset button (NMI).
|

SEGA Confidential
6
(This page is blank in the original Japanese document.)
|
SEGA Confidential
Saturn System Library User's Guide
7
2.0
Reference
2.1 List of Functions
Function
Function Name
No.
Interrupt Process Routine Registration / Reference
Registers process routine to the interrupt vector
SYS_SETSINT
1.1
Registers function to SCU interrupt routine
SYS_SETUINT
1.2
Gets registration contents of interrupt vector
SYS_GETSINT
1.3
Gets registration contents of SCU interrupt
routine
SYS_GETUINT
1.4
SCU Interrupt Mask Set, Reference, and Change Operations
Sets SCU interrupt mask
SYS_SETSCUIM
2.1
Changes SCU interrupt mask
SYS_CHGSCUIM
2.2
References SCU interrupt mask
SYS_GETSCUIM
2.3
Simple Semaphore Operation
Gets semaphore
SYS_TASSEM
3.1
Clears semaphore
SYS_CLRSEM
3.2
System Clock Switching
Switches system clock
SYS_CHGSYSCK
4.1
References system clock value
SYS_GETSYSCK
4.2
SCU Interrupt Routine Priority Change
Changes SCU interrupt routine priority
SYS_CHGUIPR
5.1
CD Multi-player Startup Execution
Executes startup of CD multi-player
SYS_EXECDMP
6.1
Power On Clear Memory Operation
Operates power-on clear memory
SYS_PCLRMEM
7.1
|
SEGA Confidential
8
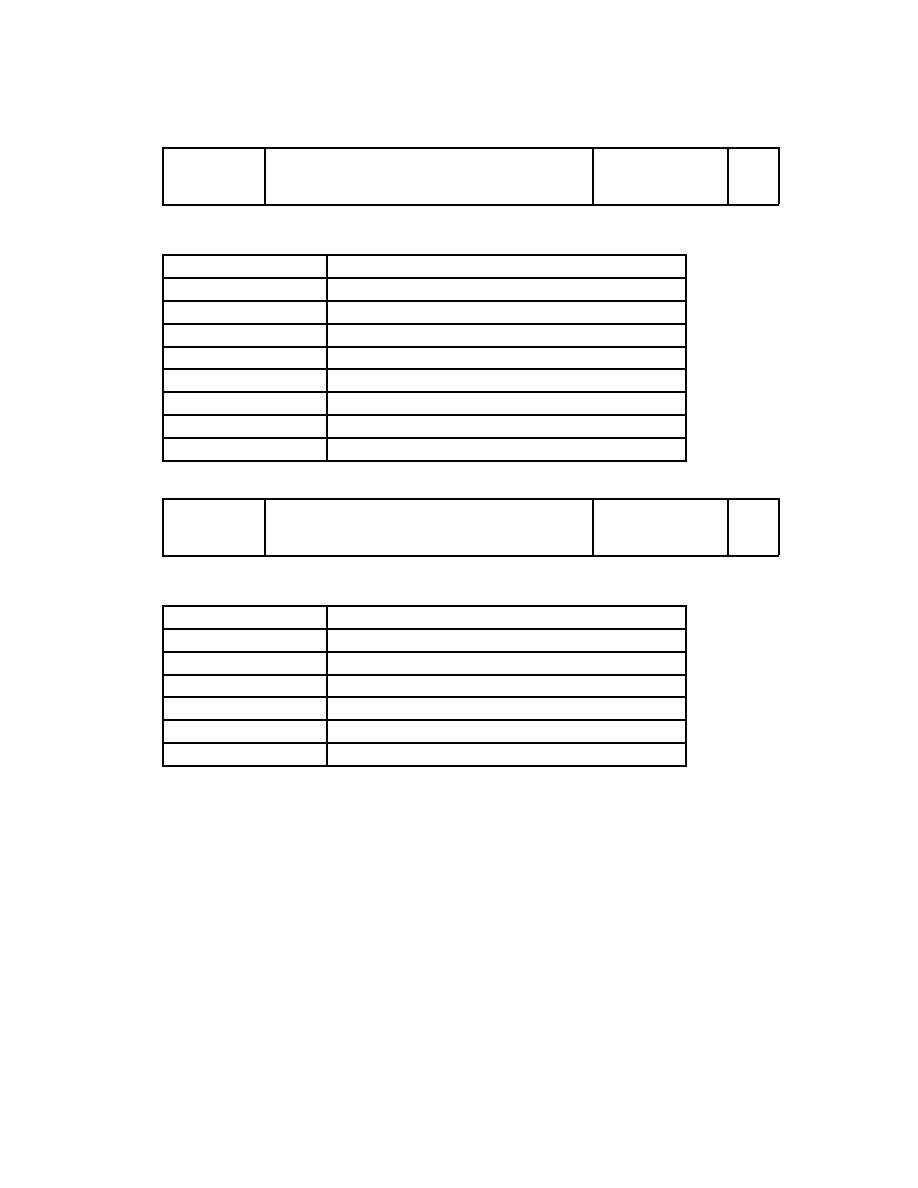
2.2 Function Specifications
Format:
void SYS_SETSINT (Uint 32 Num, void* Hdr);
Input:
Num : vector number (0..7FH)
Hdr
: interrupt process routine address (dummy routine when 0,
or that interrupt process routine when Num is the SCU
interrupt vector)
Output:
None
Function Value:
None
Function:
Hdr must be a process routine that ends by register save, return, and
RTE command (# pragma interrupt is added if using C language ).
When Hdr is 0, Num re-registers the SCU interrupt routine within the
SCU interrupt (40H..4DH,50H..5FH), others register dummy routine.
There is no range check. Values beyond restricted range must not be
specified.
Remarks:
This routine can be used with both master and slave SH2
and is registered to vector addresses based on each VBR.
Format:
void SYS_SETUINT (Uint 32 Num, void* Hdr);
Input:
Num : vector number (SCU vector number)
Hdr
: function routine address (dummy routine when 0)
Output:
None
Function Value:
None
Function:
Hdr must be a function by SHC. If the routine is created by the
assembler, it must follow the SHC register save protocol.
Num is limited to SCU interrupt vectors (40H..4DH,50H..5FH).
A dummy routine is registered when Hdr is 0. There is no range
check. Values beyond restricted range must not be specified.
Remarks:
When a routine is registered to a vector by SYS_SETSINT, the SCU
interrupt process routine of that vector becomes ineffective and
the registration function is not called. Results are not guaranteed
when this routine is called via SH2 slave.
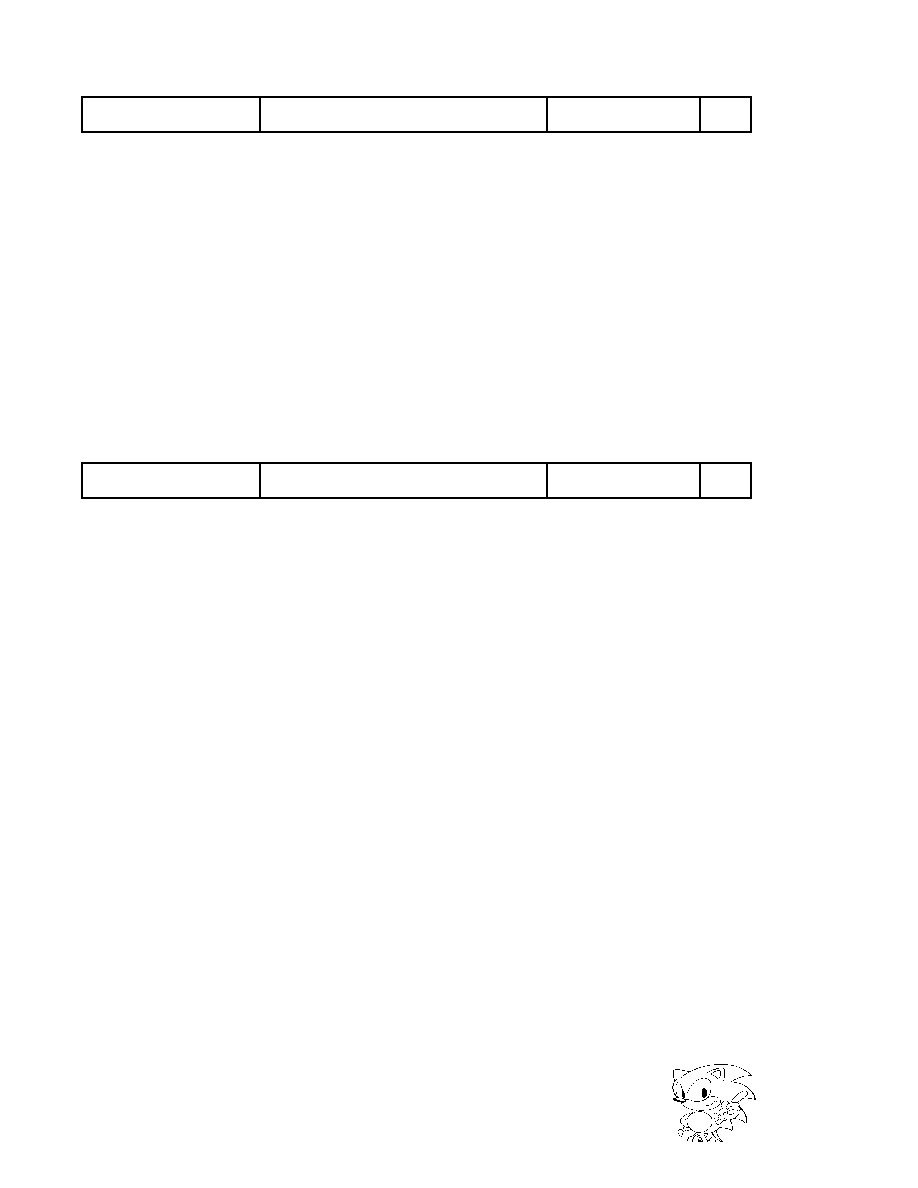
Title
Function
Function Name
No.
Function
Specifications
To the interrupt vector; registers interrupt process
routine
SYS_SETSINT
1.1
Title
Function
Function Name
No.
Function
Specifications
To SCU interrupt routine; registers process
function
SYS_SETUINT
1.2
|

SEGA Confidential
Saturn System Library User's Guide
9
Format:
void (*) () SYS_GETSINT (Uint 32 Num) ;
Input:
Num : vector number (0..7FH)
Output:
None
Function Value:
Vector registration contents (interrupt process routine address)
Function:
Contents of the Num vector returned as function values.
There is no range check. Values beyond restricted range must
not be specified.
Remarks:
This routine can be used with both master and slave SH2 and refers to
the vector addresses based on each VBR.
Format:
void (*) () SYS_GETUINT (Uint 32 Num) ;
Input:
Num : vector number (SCU vector number)
Output:
None
Function Value:
Registration contents (function routine address)
Function:
The registration contents of the SCU interrupt routine that pertains to
Num returned as function values. There is no range check. Values
beyond restricted range must not be specified.
Remarks:
Results are not guaranteed when this routine is called via slave SH2.
Format:
void SYS_SETSCUIM (Uint 32 MaskPat) ;
Input:
MaskPat : SCU interrupt mask value
Output:
None
Function Value:
None
Function:
Writes the MaskPat value to mask save memory and to the SCU
interrupt register, and then writes the same value to the SCU interrupt
status register. However, if the A-bus interrupt mask bit is allowed,
the upper word of the status register is cleared, and the A-bus inter-
rupt acknowledge register is cleared as well.
Remarks:
This routine must not be used from the interrupt process (for SCU
interrupt only) (The value of SYS_GETSCUIM becomes undefined
during the SCU interrupt process.)
The SCU interrupt may disappear when it occurs during the process
(SCU specifications). This possibility should either be avoided or the
usage should occur under conditions where there is no related knowl-
edge thereof. Results cannot be guaranteed when this routine is
called via slave SH2.
Title
Function
Function Name
No.
Function
Specifications
Gets registration contents of SCU interrupt
routine
SYS_GETUINT
1.4
Title
Function
Function Name
No.
Function
Specifications
Gets registration contents of interrupt vector
SYS_GETSINT
1.3
Title
Function
Function Name
No.
Function
Specifications
Sets SCU interrupt mask
SYS_SETSCUIM
2.1
|
SEGA Confidential
Format:
void SYS_CHGSCUIM (Uint 32 AndMask, Uint32 OrMask) ;
Input:
AndMask
: Mask value used for authorizing
OrMask
: Mask value used for denying
Output:
None
Function Value:
None
Function:
Takes the logical product of the contents of the mask memory and the
AndMask and writes the result of the logical sum of that and the Or-
Mask to the mask save memory and the SCU interrupt. However, if
the A-bus interrupt mask bit is allowed, the upper word of the status
register is cleared, and the A-bus interrupt acknowledge register is
cleared as well. These operations are executed inseparably.
Remarks:
This routine must not be used from the interrupt process (for SCU
interrupt only) (The value of SYS_GETSCUIM becomes undefined
during the SCU interrupt process.)
The SCU interrupt may disappear when it occurs during the
process (SCU specifications). This possibility should either be
avoided or the usage should occur under conditions where there is no
related knowledge thereof. Results cannot be guaranteed when this
routine is called via slave SH2.
Format:
Uint 32 SYS_GETSCUIM ;
Input:
None
Output:
None
Function Value:
Mask save memory value
Function:
This function reads the mask save memory value. If this value
performs settings and changes of the SCU interrupt mask register
using the aforementioned function, it is the same as the value actually
set in the SCU interrupt mask register.
Remarks:
During the SCU interrupt process, the change is made to the value
that is set when the application uses SYS_SETSCUIM () and
SYS_CHGSCUIM () where the change is made to the logical sum
of the mask value by interrupt cause factor (when the application uses
SYS_CHGUIPR() and setting has been made, the corresponding
values within that table). However, the interrupt becomes multi-level
and changes to the logical sum. Consequently, this value becomes
undefined during the SCU interrupt process. During this procedure,
a process that relies on referenced values should not be performed.
10
Title
Function
Function Name
No.
Function
Specifications
Changes SCU interrupt mask
SYS_CHGSCUIM
2.2
Title
Function
Function Name
No.
Function
Specifications
References SCU interrupt mask value
SYS_GETSCUIM
2.3
|
SEGA Confidential
Saturn System Library User's Guide
11
Format:
Uint 32 SYS_TASSEM (Uint 32 Num) ;
Input:
Num : semaphore number (0 ~ FFH)
Output:
None
Function Value:
Result (1: acquired, 0: already acquiring another)
Function:
TAS command to memory (1 byte) linked to Num number is executed
and the results are returned to function values. There is no range
check. Values beyond the restricted range must not be specified. This
routine can be used with both master and slave SH2.
Format:
void SYS_CLRSEM (Uint 32 Num) ;
Input:
Num
: semaphore number (0 ~ FFH)
Output:
None
Function Value:
None
Function:
Clears the memory (1 byte) linked to Num number. There is no range
check. Values outside restrictions must not be specified. This routine
can be used with both master and slave SH2.
Format:
void SYS_CHGSYSCK (Uint 32 CkMode) ;
Input:
CkMode: 0: CPU 26 MHz, 320/640 Mode
1: CPU 28 MHz, 352/704 Mode
Output:
None
Function Value:
None
Function:
System clock is switched to the value specified by CkMode.
Remarks:
See the overview and the SMPC Manual regarding reset devices and
processing time. The system hangs up when this routine is called via
slave SH2. Be sure to call via master SH2.
Title
Function
Function Name
No.
Function
Specifications
Gets semaphore
SYS_TASSEM
3.1
Title
Function
Function Name
No.
Function
Specifications
Clears semaphore
SYS_CLRSEM
3.2
Title
Function
Function Name
No.
Function
Specifications
Switches System Clock
SYS_CHGSYSCK
4.1
|

SEGA Confidential
12
Format:
Uint 32 SYS_GETSYSCK ;
Input:
None
Output:
None
Function Value:
0 or 1: the final SYS_CHGSYSCK () parameter value
Function:
Reads the system clock value. Parameter value when
SYS_CHGSYSCK () is called for the last time.
Remarks:
Please reference this value via master SH2.
Format:
void SYS_CHGUIPR (Uint 32 *IprTab) ;
Input:
IprTab
: 32 long word data array
Output:
None
Function Value:
None
Function:
The SCU interrupt routine priority table of the Boot ROM is rewritten
as the table value specified by IprTab. If rewrite is performed once,
interrupt processing by the SCU interrupt routine is executed in
accordance with the priority of the table values pertaining to each
factor.
Note:
The table contents are not checked. If inconsistencies relating to priority exist in the table, the
system may hang up.
Remarks:
Table settings are valid until the next rewrite. During this interval,
there is no need for the application to save the table specified in the
parameters. Further, reset returns to the initial set value of the Boot
ROM. The results cannot be guaranteed when this routine is called
via slave SH2.
Format:
void SYS_EXECDMP (void) ;
Input:
None
Output:
Does not return to call side.
Function Value:
None
Function:
Starts and executes the CD multiplayer.
Remarks:
The system hangs up when this routine is called via slave SH2.
Be sure to call via master SH2.
Title
Function
Function Name
No.
Function
Specifications
References System Clock Value
SYS_GETSYSCK
4.2
Title
Function
Function Name
No.
Function
Specifications
Change SCU Interrupt Routine Priority
SYS_CHGUIPR
5.1
Title
Function
Function Name
No.
Function
Specifications
Starts and Executes CD Multiplayer
SYS_EXECDMP
6.1
|

SEGA Confidential
Saturn System Library User's Guide
13
Format:
Uint8 *SYS_PCLRMEM
Input:
Perform normal memory access.
Output:
Perform normal memory access.
Function Value:
None
Function:
8 byte memory address controlled by the Boot ROM. This memory is
initialized to 0 only when the power is turned on, but the contents are
saved by the reset button (NMI).
Remarks:
A check of the range is not performed. Be careful not to access outside
the range.
Title
Function
Function Name
No.
Function
Specifications
Operates Power On Clear Memory
SYS_PCLRMEM
7.1
|

SEGA Confidential
14
(This page is blank in the original Japanese version.)
|

SEGA Confidential
Saturn System Library User's Guide
15
SMPC I/F User's Manual
1.0 Guide
This library uses functions of the SMPC (System Management and Peripheral Con-
trol).
2.0 Features
· Able to greatly decrease the main CPU burden.
· The main CPU and SMPC interface is a software handshake method using the
SMPC register.
|
SEGA Confidential
16
3.0 Overview
3.1 Function Overview
SMPC functions can be divided into the system management system and peripheral
control system.
·
System Management System
The system management system resets the hardware (CPU, sound, etc.), sets the
clock, and performs acquisition.
·
Peripheral Control System
The peripheral control system collects data automatically from peripherals con-
nected to the peripheral I/F, and returns it to the main CPU.
3.2 Process Overview
The interface between the SMPC and the main CPU is a handshake. In executing a
function (command), required parameters are written to the SMPC register. The
command write procedure is followed. SMPC executes processing in response to
commands when commands are written. Processes include IntBack and Non-
IntBack.
·
IntBack
Intback is the process of returning results through interrupts (SMPC interrupts)
after commands are passed to the SMPC. SMPC interrupt processing and regis-
tration are performed in the library. Also, other interrupt processes are prohib-
ited during the SMPC interrupt process. Timing of issuing command issuance
differs according to the function.
·
Non-IntBack
Non-IntBack is a process that only passes commands to the SMPC. The library
function waits for the SMPC process to end. (See the SMPC User's Manual for
details of each SMPC process time.) The functions (reset, etc.) that can be used
by this process are functions which do not have to receive results after a com-
mand has been passed.
Shown below are the processing systems that can be used by each function.
O : Processing, X : Not processing
IntBack
Non-IntBack
System Management
O
O
Peripheral Control
O
X
|
SEGA Confidential
Saturn System Library User's Guide
17
4.0 Details
4.1 Functions
·
System Management System
The system management system has the following functions.
(Note)
Clock change 320,352 is provided by the system library.
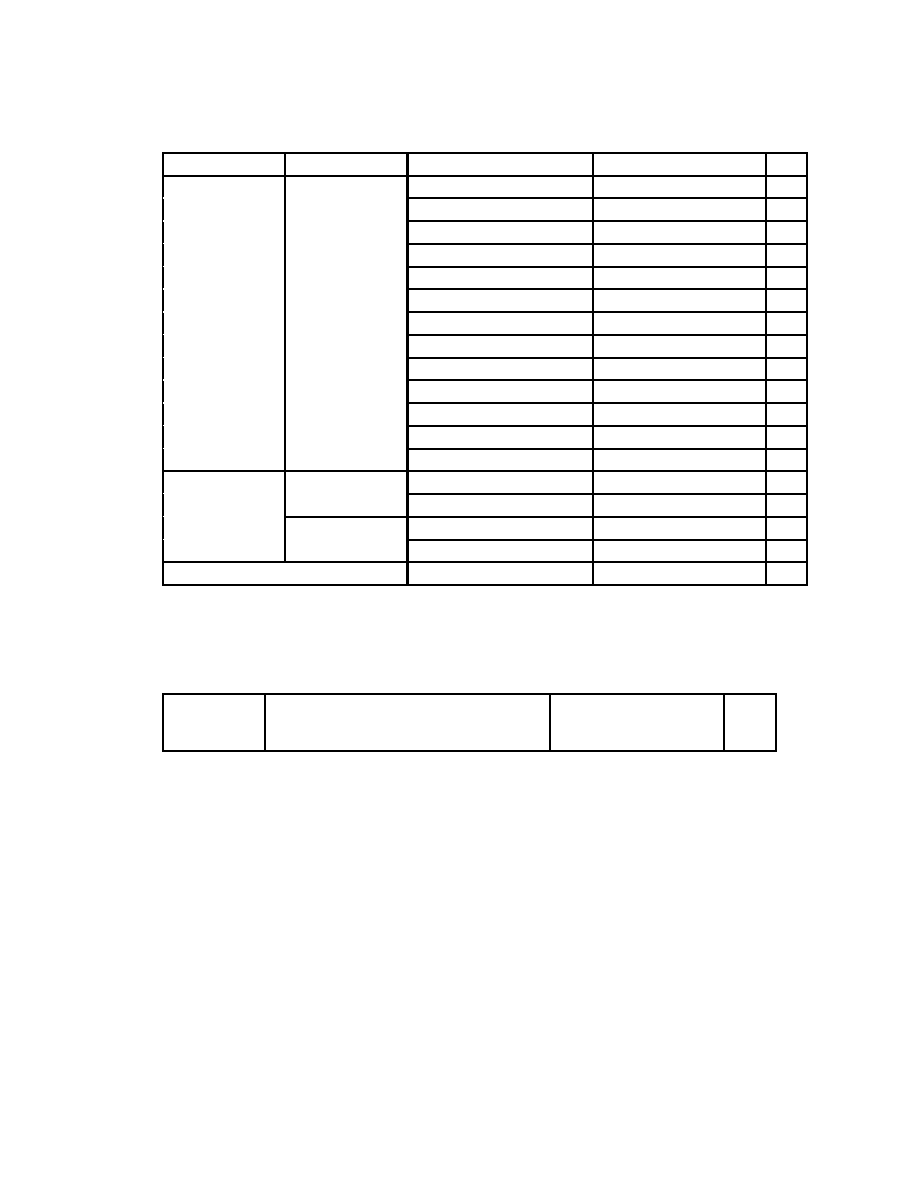
·
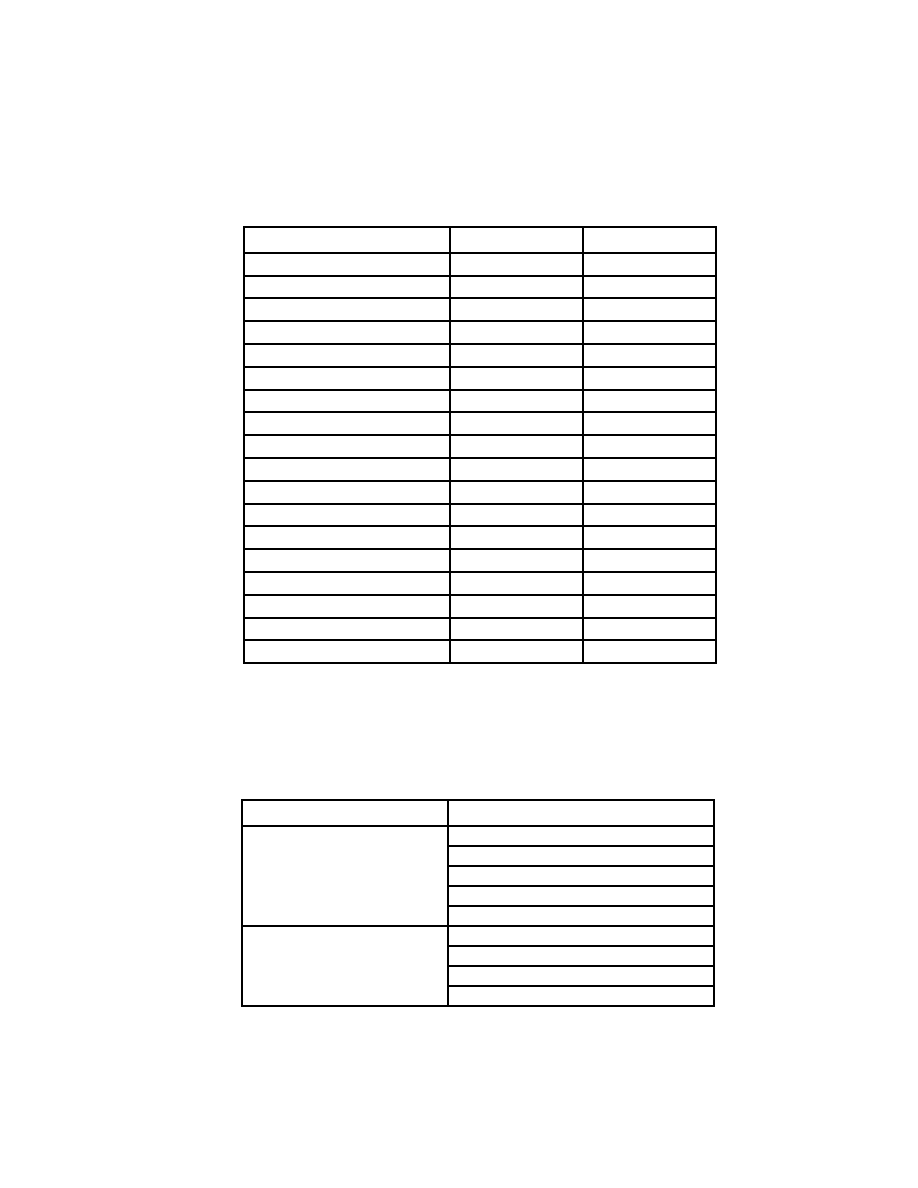
Peripheral Control System
The following peripherals are supported by the library.
Function
IntBack
Non-IntBack
Master SH2 ON
X
O
Slave SH2 ON
X
O
Slave SH2 OFF
X
O
Sound ON
X
O
Sound OFF
X
O
CD ON
X
O
CD OFF
X
O
Entire system reset
X
O
NMI Request
X
O
Hot reset enable
X
O
Hot reset disable
X
O
Get cartridge code
O
X
Get area code
O
X
Get system status
O
X
Set SMPC memory
X
O
Get SMPC memory
O
X
Set time
X
O
Get time
O
X
Game Device
Peripheral Name
Saturn Peripherals
Digital Devices
Analog Devices
Pointing Devices (mouse)
Keyboard
Multitap (6P)
Mega Drive Peripherals
3-button Pad
6-button Pad
4P adapter
Mouse
|

SEGA Confidential
18
4.2 Process
4.2.1 Library Configuration
·
Non-IntBack Command Issuance
This is the Non-IntBack system process.
·
IntBack Command Issuance
Gets system data (except for time)
This process is performed once per game.
Gets peripheral data and time data
This is a process required for each frame.
4.2.2 Recommended Examples
Recommended examples of three patterns are shown below.
1
2
3
Non-IntBack Command Issuance
O
IntBack
Commnad
Issuance
Get system data
O
Get peripheral data
O
O
O
Get peripheral data and time data
O
O
|

SEGA Confidential
Saturn System Library User's Guide
19
·
Chart
Descriptions
Main Process
IntBack initialization (1) : Specifies system data acquisition
IntBack initialization (2) : Specifies peripheral data acquisition
IntBack initialization (3) : Specifies peripheral data acquisition and time data
acquisition
SMPC Process
(1) : System data collection process
(2) : Peripheral data collection process
(3) : Time data collection process
(1) Pattern 1
*
*
|

SEGA Confidential
20
4.2.3 Restrictions
·
Common
·
Do not issue commands after V-Blank IN until 300
µ
s has elapsed.
·
Do not issue commands after issuing the IntBack command until the next V-Blank
IN.
·
Cautions when executing in multiple tasks
In cases in which the interrupt task is changed when using the library with
multiple tasks, because SMPC exclusive control is not performed in the library,
SMPC deadlock may occur and SMPC operation may become abnormal. As a
result, when executing with multiple tasks, the exclusive control of library must
be performed by the user.
·
For restrictions from slave SH2 see the SMPC User's Manual.
·
Command process time may vary between 20
µ
s to 100
µ
s, because there is 1 SMPC
internal process per second.
·
Non-IntBack Command Issue Function
·
There are no restrictions other than Common (above).
|

SEGA Confidential
Saturn System Library User's Guide
21
· IntBack Command Issue Function
System Data Acquisition (Excluding time)
·
There are no restrictions other than Common (above).
Peripheral Data Acquisition, Time Data Acquisition
·
Do not issue a command after issuing the IntBack command until the next V-Blank
IN.
·
Issue a IntBack command 14 ms before the specified V-Blank IN.
·
The peripheral data collection process within SMPC is done during one vertical
display period.
·
(Time out) data that could not be acquired at the instructed V-Blank IN after the
IntBack command is issued cannot be acquired thereafter.
·
If a time out frequently occurs, peripherals are handled as unconnected.
·
In SMPC, peripheral acquisition begins in such a way that the peripheral
acquisiton ends 1ms before the specified V-Blank.
·
Number of V-Blank IN Skips
The number of V-Blank skips indicates the execution timing of the peripheral
data collection process in SMPC after the IntBack command is issued. This is
provided for games that change frames by 2 frames or more. The peripheral
data collection process in SMPC is executed in V-DISP before the (V-Blank In
skip number + 1)th V-Blank IN after the IntBack command is issued . Set 0
when executing in V-Blank IN immediately after issuing the IntBack command.
|
SEGA Confidential
22
4.3 Peripheral Control
Peripheral controls must be created in accordance with game creation standards.
The library is created intelligently, thus enabling them to be created easily.
4.3.1
Policy
The peripheral acquisition process is created according to the following policies for
flexible response to the user.
· Able to accommodate peripherals to be sold in the future.
· Methods that do not provide multitap awareness.
· Perform corrective measures against problems.
4.3.2
Method
(1) Overview
·
Each peripheral IDs and peripheral data is obtained by specifying as inputs the
required number of peripherals, peripheral IDs and preferred size.
·
Even when the peripheral acquisition ID and connected peripheral ID are different,
data is obtained if peripherals are connected. For example, analog device data is
obtained as mouse data.
(Example)
Input
Required number of peripherals = 3
Peripheral ID = digital device
Peripheral size = digital device size
Connection Status
Main connector 1 = multi-tap 6P
Multi-tap connector 1 = digital device
Multi-tap connector 3 = analog device
Main connector 2 = keyboard device
(Other devices are not connected to peripherals)
Output
Peripheral ID
Peripheral Data
No. 1
Digital
Digital Format
No. 2
Unconnected
Invalid
No. 3
Analog
Digital Format
|

SEGA Confidential
Saturn System Library User's Guide
23
5.0 Calling Sequence
Recommended example of pattern 3 calling sequence.
Uint32 work[10];
/* peripheral data acquisition work area
*/
PerGetSys *sys_data;
/* system data
*/
PerDgtInfo *get_per;
/* peripheral output data pointer
*/
Uint8 *get_tim;
/* time output data pointer
*/
· Initial Process (Immediately after the V-Blank Process).
PER_Init (PER_KD_SYS, 0, 0, 0, NULL, 0);
/* get system data is specified*/
. . .
sys_data = PER_GET_SYS () ;
/* get system data */
· Normal (Immediately after the V-Blank Process).
PER_Init (PER_KD_PERTIM, 3, PER_ID_DGT, PER_SIZE_DGT, work, 0);
/* Peripheral data and time data acquisition are specified */
...
· Normal for 2 or more times (Immediately after the V-Blank Process).
PER_GetPer (PerGetPer **) &get_per);
/* get peripheral data
*/
get_tin = PER_GET_TIM ();
/* get time
*/
if (((get_per[2].data) & PER_DGT_U) == PER_DGT_U_) { /* current pe-
ripheral data of connector 3 is UP ? */
. . .
. . .
|
SEGA Confidential
24
6.0 Data Specifications
6.1 List of Data
Function
Function name
N o .
IntBack
Peripheral ID data type
PerId
1
Peripheral size data type
PerSize
2
IntBack Kind
PerKind
3
Required number of peripherals
PerNum
4
System data output data type
PerGetSys
5
Peripheral data output data type
PerGetPer
6
Device information data type
Digital device info data type
PerDgtInfo
7
Analog device info data type
PerAnlInfo
8
Pointing device info data type
PerPntInfo
9
Keyboard device info data type
PerKbdInfo
10
Mega Drive 3-button pad info data type PerM3bpInfo
11
Mega Drive 6-button pad info data type PerM6bpInfo
12
Device Data Type
Digital device data type
PerDgtData
13
Analog device data type
PerAnlData
14
Pointing device data type
PerPntData
15
Keyboard device data type
PerKbdData
16
Mega Drive 3-button pad data type
PerM3bpData
17
Mega Drive 6-button pad data type
PerM6bpData
18
|
SEGA Confidential
Saturn System Library User's Guide
25
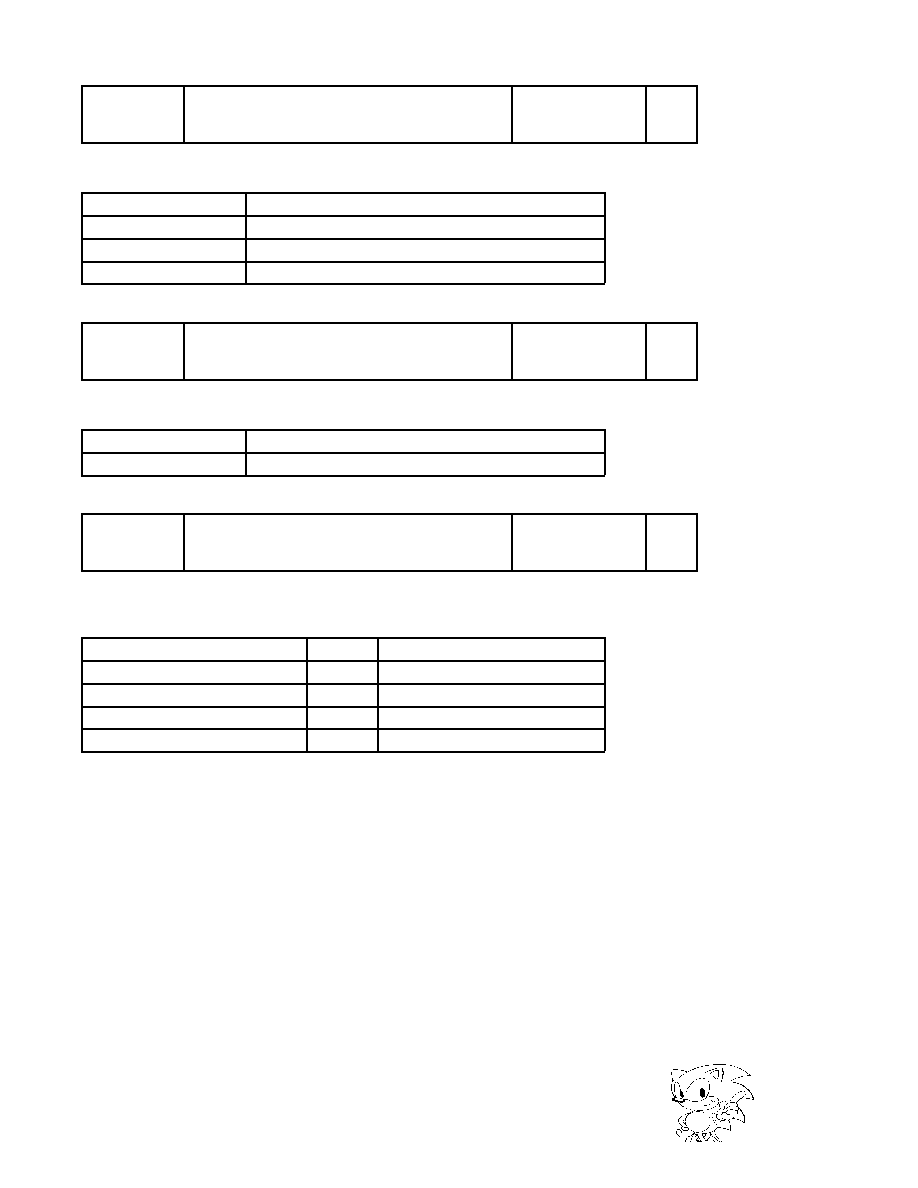
6.2 Data Specifications
IntBack command issuance
Title
Data
Data Name
No.
Data
Specifications
Peripheral ID data type
PerId
1
This data type shows the peripheral ID.
Constant name
Description
PER_ID_NCON
Unconnected
PER_ID_UNKNOW
Peripherals that cannot be processed by SMPC
PER_ID_DGT
Digital Device
PER_ID_ANL
Analog Device
PER_ID_PNT
Pointing Device (Mega Drive mouse)
PER_ID_KBD
Keyboard
PER_ID_M3BP
Mega Drive 3-button pad
PER_ID_M6BP
Mega Drive 6-button pad
Title
Data
Data Name
No.
Data
Specifications
Peripheral size data type
PerSize
2
This data type shows the peripheral size.
Constant name
Description
PER_SIZE_DGT
Digital Device
PER_SIZE_ANL
Analog Device
PER_SIZE_PNT
Pointing Device (Mega Drive mouse)
PER_SIZE_KBD
Keyboard
PER_SIZE_M3BP
Mega Drive 3-button pad
PER_SIZE_M6BP
Mega Drive 6-button pad
|
SEGA Confidential
26
Title
Data
Data Name
No.
Data
Specifications
IntBack kind data type
PerKind
3
This data type shows the IntBack kind.
Constant name
Description
PER_KD_SYS
System data acquisition (except time)
PER_KD_PER
Peripheral data acquisition
PER_KD_PERTIM
Peripheral data acquisition + time data acquisition
Title
Data
Data Name
No.
Data
Specifications
Required number of peripherals data type
PerNum
4
This data type shows the required number of peripherals.
V a l u e
Meaning
0 ~ 31
1P ~ 32P
Title
Data
Data Name
No.
Data
Specifications
System data output data type
PerGetSys
5
This data type shows the system data output.
PerGetSys *data
Access Macro
T y p e
Description
PER_GS_AC (data)
Uint8
Area code
PER_GS_SS (data)
Uint16
System status
PER_GS_SM (data)
Uint32
SMPC memory
PER_GS_SMPC_STAT (data)
Uint8
SMPC status
|
SEGA Confidential
Saturn System Library User's Guide
27
Shown below are the constants and values that can be used by each access macro.
PER_GS_CC (data)
bit 7
bit 0
0
0
0
0
0
0
CTR1
CTR0
PER_GS_AC (data)
bit 7
bit 0
0
0
0
0
ACODE
3
ACODE
2
ACODE
1
ACODE
0
See the hardware manual for areas indicated an area codes.
PER_GS_SS (data)
Bit Position Constant
Acquisition Value
PER_SS_DOTSEL
DOTSEL signal status
PER_SS_SYSRES
SYSRES signal status
PER_SS_MSHNMI
MSHNMI signal status
PER_SS_SNDRES
SNDRES signal status
PER_SS_CDRES
CDRES signal status
Description of Acquisition Values
Value
Meaning
0
OFF
1
ON
PER_GS_SM (data)
Areas which are used in common by applications and Boot ROM.
Bit Position Constant
Acquisition Value
PER_MSK_LANGU
Language (see below)
PER_MSK_SE
SE (0: ON, 1: OFF)
PER_MSK_STEREO
STEREO or MONO (0: STEREO, 1: MONO)
PER_MSK_HELP
HELP (0: ON, 1: OFF)
Language Constant
Constant
Description
PER_JAPAN
Japanese
PER_ENGLISH
English
PER_FRANCAIS
French
PER_DEUTSCH
German
PER_ITALIANO
Italian
PER_ESPNOL
Spanish
|

SEGA Confidential
28
PER_GS_SMPC_STAT (data)
This data type shows peripheral data output.
·
Device Information Data Type
This data type shows digital device information.
typedef struct
{
/* digital device
*/
PerDgtData
data;
/* current peripheral data
*/
PerDgtData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerDgtInfo;
This data type shows analog device information.
typedef struct
{
/* analog device
*/
PerAnlData
data;
/* current peripheral data
*/
PerAnlData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerAnlInfo;
Title
Data
Data Name
No.
Data
Specifications
Analog device information data type
PerAnlInfo
8
Title
Data
Data Name
No.
Data
Specifications
Digital device information data type
PerDgtInfo
7
Bit Position Constant
Acquisition Value
PER_SS_RESET
Reset mask condition
0: reset enable
1: reset disable (default)
PER_SS_SETTIME
Time set condition
0: time is not set after SMPC cold reset
1: time is set after SMPC cold reset
Title
Data
Data Name
No.
Data
Specifications
Peripheral data output data type
PerGetPer
6
|
SEGA Confidential
Saturn System Library User's Guide
29
This data type shows pointing device information.
typedef struct
{
/* pointing device
*/
PerPntData
data;
/* current peripheral data
*/
PerPntData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerPntInfo;
This data type shows keyboard device information.
typedef struct
{
/* keyboard device
*/
PerKbdData
data;
/* current peripheral data
*/
PerKbdData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerKbdInfo;
This data type shows Mega Drive 3-button pad information.
typedef struct
{
/* Mega Drive 3-button pad
*/
PerM3bpData
data;
/* current peripheral data
*/
PerM3bpData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerM3bpInfo;
This data type shows Mega Drive 6-button pad information.
typedef struct
{
/* Mega Drive 6-button pad
*/
PerM6bpData
data;
/* current peripheral data
*/
PerM6bpData
push;
/* previously not pressed currently pressed button
*/
PerId
id;
/* peripheral ID
*/
} PerM6bpInfo;
Title
Data
Data Name
No.
Data
Specifications
Pointing device information data type
PerPntInfo
9
Title
Data
Data Name
No.
Data
Specifications
Keyboard device information data type
PerKbdInfo
10
Title
Data
Data Name
No.
Data
Specifications
Mega Drive 3-button pad information data type
PerM3bpInfo
11
Title
Data
Data Name
No.
Data
Specifications
Mega Drive 6-button pad information data type
PerM6bpInfo
12
|

SEGA Confidential
30
·
Device Data Type
The meaning of the device data bit acquisition value is explained below.
Description of Acquisition Values
Value
Meaning
0
Button is pressed
1
Button is not pressed
Title
Data
Data Name
No.
Data
Specifications
Digital device data type
PerDgtData
13
This data type shows the digital device.
typedef Uint16
PerDgtData;
/* digital device data type */
Bit Position Constant
Acquisition Value
PER_DGT_U
UP
PER_DGT_D
DOWN
PER_DGT_R
RIGHT
PER_DGT_L
LEFT
PER_DGT_A
A
PER_DGT_B
B
PER_DGT_C
C
PER_DGT_S
START
PER_DGT_X
X
PER_DGT_Y
Y
PER_DGT_Z
Z
PER_DGT_TR
TRG-RIGHT (upper right of the device)
PER_DGT_TL
TRG-LEFT (upper left of the device)
Title
Data
Data Name
No.
Data
Specifications
Analog device data type
PerAnlData
14
This data type shows the analog device.
typedef struct
{
/* analog device data type
*/
PerDgtData
dgt;
/* digital device data type
*/
Sint16
x;
/* X axis absolute value (0 ~ 255)
*/
Sint16
y;
/* Y axis absolute value (0 ~ 255)
*/
Sint16
z;
/* Z axis absolute value (0 ~ 255)
*/
} PerAnlData;
|
SEGA Confidential
Saturn System Library User's Guide
31
Title
Data
Data Name
No.
Data
Specifications
Pointing device data type
PerPntData
15
This data type shows the pointing device.
typedef struct
{
/* pointing device data type
*/
PerPntData
dgt;
/* digital device data type
*/
Sint16
data;
/* data
*/
Uint16
x;
/* amount of X axis movement (-128 ~ 127)
*/
Sint16
y;
/* amount of Y axis movement (-128 ~ 127)
*/
} PerPntData;
Shown below are constants and values that can be used by each member.
Data
Bit Position Constant
Acquired value
PER_PNT_R
RIGHT
PER_PNT_L
LEFT
PER_PNT_MID
MIDDLE
PER_PNT_CNT
CENTER
PER_PNT_X0
X axis overflow (0: overflows, 1: does not overflow)
PER_PNT_Y0
Y axis overflow (0: overflows, 1: does not overflow)
Title
Data
Data Name
No.
Data
Specifications
Keyboard device data type
PerKbdData
16
This data type shows the keyboard device.
typedef struct
{
/* keyboard device data type
*/
PerDgtInfo
dgt;
/* digital device data type
*/
Uint8
skey;
/* special key
*/
Uint8
key;
/* key
*/
} PerKbdData;
Shown below are constants and values that can be used by each member.
skey
Bit Position Constant
Acquired value
PER_KBD_CL
Caps Lock
PER_KBD_NL
Num Lock
PER_KBD_SL
Scroll Lock
PER_KBD_MK
Make (0: key pressed, 1: key not pressed)
PER_KBD_BR
Break (0: key released, 1: key not released)
|

SEGA Confidential
32
Title
Data
Data Name
No.
Data
Specifications
Mega Drive 3-button pad data type
PerM3bpData
17
This data type shows the Mega Drive 3-button pad.
typedef Uint8
PerM3bpData;
/* Mega Drive 3-button pad data type
*/
PER_M3BP_U ~ PER_M3BP_S is the same as PER_DGT_U ~ PER_DGT_S. PER_DGT_X ~ PER_DGT_TL
is the condition when the button is not pressed.
Bit Position Constant
Acquired Value
PER_M3BP_U
UP
PER_M3BP_D
DOWN
PER_M3BP_R
RIGHT
PER_M3BP_L
LEFT
PER_M3BP_A
A
PER_M3BP_B
B
PER_M3BP_C
C
PER_M3BP_S
START
Title
Data
Data Name
No.
Data
Specifications
Mega Drive 6-button pad data type
PerM6bpData
18
This data type shows the Mega Drive 6-button pad.
typedef Uint16
PerM6bpData;
/* Mega Drive 6-button pad data type
*/
PER_M6BP_U ~ PER_M6BP_MD is the same as PER_DGT_U ~ PER_DGT_TR.
PER_DGT_TL is the condition when the button is not pressed.
Bit Position Constant
Acquisition Value
PER_M6BP_U
UP
PER_M6BP_D
DOWN
PER_M6BP_R
RIGHT
PER_M6BP_L
LEFT
PER_M6BP_A
A
PER_M6BP_B
B
PER_M6BP_C
C
PER_M6BP_S
START
PER_M6BP_X
X
PER_M6BP_Y
Y
PER_M6BP_Z
Z
PER_M6BP_MD
MODE (upper right of device)
|
SEGA Confidential
Saturn System Library User's Guide
33
7.0 Function Specifications
7.1 List of Functions
7.2 Function Specifications
Non-IntBack
Format:
void PER_SMPC_XXX (void)
Input:
None
Output:
None
Function Value:
None
Function:
As per the list of function specifications. See the SMPC hardware
manual for details.
Function
Function Name
N o .
Non-IntBack
Command Issue
Master SH2 ON
PER_SMPC_MSH_ON
1
Slave SH2 ON
PER_SMPC_SSH_ON
2
Slave SH2 OFF
PER_SMPC_SSH_OFF
3
Sound ON
PER_SMPC_SND_ON
4
Sound OFF
PER_SMPC_SND_OFF
5
CD ON
PER_SMPC_CD_ON
6
CD OFF
PER_SMPC_CD_OFF
7
Reset entire system
PER_SMPC_SYS_RES
8
NMI request
PER_SMPC_NMI_REQ
9
Hot reset enable
PER_SMPC_RES_ENA
10
Hot reset disable
PER_SMPC_RES_DIS
11
SMPC memory set
PER_SMPC_SET_SM
12
Time set
PER_SMPC_SET_TIM
13
IntBack
Command Issue
IntBack Initialization
PER_Init
14
Peripheral data acquisition
PER_GetPer
15
Other
Time acquisition
PER_GET_TIM
16
System data acquisition
PER_GET_SYS
17
Other
Hot reset acquisition
PER_GET_HOT_RES
18
Title
Function
Function Name
No.
Function
Specifications
Master SH2 ON ~ hot reset disable
PER_SMPC_MSK_ON ~
PER_SMPC_RES_DIS
1 ~ 11
|
SEGA Confidential
34
Format:
void PER_SMPC_SET_SM (Uint32 input_dt)
Input:
input_dt
: SMPC memory
See System data output data type for the meaning of each bit value.
Output:
None
Function Value:
None
Function:
Sets the SMPC memory. Because the SMPC memory is an area that
is used in common by applications and the Boot ROM, the format
must be observed.
Format:
void PER_SMPC_SET_TIM (Uint8 * input_dt)
Input:
input_dt: time
Input Format
· Day data: Sunday is 0, Monday is 1, Tuesday is 2 . . .
· Month data is hexadecimal data.
Output:
None
Function Value:
None
Function:
Sets the time.
bit7
bit4
bit3
bit0
*(input_dt)
second (10 digit)
second (1 digit)
*(input_dt + 1)
minute (10 digit)
minute(1 digit)
*(input_dt + 2)
hour (10 digit)
hour (1 digit)
*(input_dt + 3)
day (10 digit)
day (1 digit)
*(input_dt + 4)
day of week (0 ~ 6)
month (1H ~ CH)
*(input_dt + 5)
year (10 digit)
year (1digit)
*(input_dt + 6)
year (1000 digit)
year (100 digit)
Title
Function
Function Name
No.
Function
Specifications
Sets SMPC memory
PER_SMPC_SET_SM
12
Title
Function
Function Name
No.
Function
Specifications
Sets time
PER_SMPC_SET_TIM
13
|
SEGA Confidential
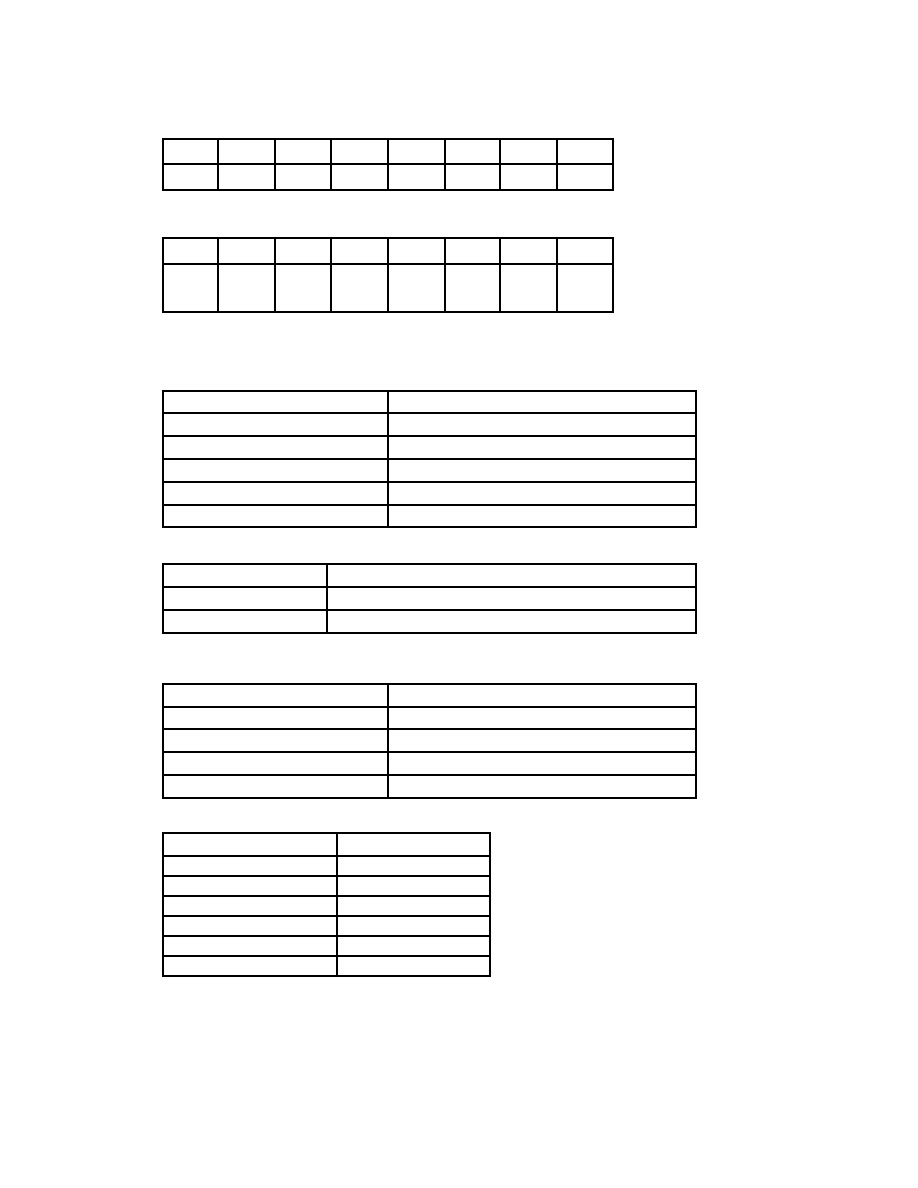
IntBack
Format:
Uint32 PER_Init (PerKind kind, PerNum num, PerId id,
PerSize size, Uint32 work[n], Uint8 v_blank)
Input:
kind
: IntBack type
num
: Required number of peripherals
id
: Peripheral ID
size
: Peripheral size
work
: Work area (Use for getting peripheral data. Must be
declared by a global variable.)
v_blank
: Number of V-Blank skip
·
Method for calculating the work area
n = (num x data A)/4 + data B
round up to nearest digit
Data A and data B change depending on the peripheral.
Output:
none
Function Value:
execution condition
Function:
Initializes IntBack and issues the IntBack command. Execution rules
must be obvserved. Set Null or 0 to unneeded parameters. Execute at
least 1 time before executing PER_GetPer (), PER_GetTim(),
PER_GetSys().
Remarks:
Generally, this should be executed immediately after the V-Blank
process. Other interrupts are prohibited during SMPC interrupts.
Note:
DO NOT perform this function within the interrupt process. Be sure
to perform via the main process.
Saturn System Library User's Guide
35
Peripheral
Data A
Data B
Digital device
12
1
Analog device
36
2
Pointing device
36
2
Keyboard device
20
1
Mega Drive 3-button pad
6
1
Mega Drive 6-button pad
12
1
Constant
Description
PER_INT_ERR
Could not issue the IntBack command
PER_INT_OK
Could issue the IntBack command
Title
Function
Function Name
No.
Function
Specifications
Initializes IntBack
PER_Init
14
|

SEGA Confidential
36
Format:
Uint32 PER_GetPer (PerGetPer **output_dt)
Input:
none
Output:
output_dt: peripheral output address (Null = cannot get)
Function Value:
Execution conditions.
Function Value:
Issues the IntBack command and gets peripheral data. Execution
rules must be observed. Before this function is executed, specify "pe-
ripheral data get" to PER_Init() and execute at least once. Null is
output to the peripheral data address when peripheral data get is not
specified.
Remarks:
Generally, this should be executed immediately after the V-Blank
process. Other interrupts are prohibited during SMPC interrupt.
Format:
Uint8 *PER_GET_TIM (void)
Input:
none
Output:
none
Function Value:
Time data address
Function:
Gets time data. Before this function is executed, instructs peripheral
data get and time get to PER_Init() and execute at least once.
Format:
PerGetSys *PER_GET_SYS (void)
Input:
none
Output:
none
Function Value:
System data address (NULL = could not get)
Function:
Gets system data. Instructs system data get to PER_Init () before this
function is executed and execute at least once. Execute this function
about 300
µ
s after executing PER_Init.
Constant
Description
PER_INT_ERR
Could not issue the IntBack command.
PER_INT_OK
Could not issue the IntBack command.
Title
Function
Function Name
No.
Function
Specifications
Peripheral data acquisition
PER_GetPer
15
Title
Function
Function Name
No.
Function
Specifications
Gets time
PER_GET_TIM
16
Title
Function
Function Name
No.
Function
Specifications
Gets system data
PER_GET_SYS
17
|

SEGA Confidential
Other
Format:
Uint8 PER_GET_HOT_RES (void)
Input:
none
Output:
none
Function Value:
Hot reset condition address
Function:
Gets the hot reset condition. This function can be executed at any
time. Update is performed by PER_GetPer().
Saturn System Library User's Guide
37
Constant
Description
PER_HOT_RES_ON
Hot reset ON
PER_HOT_RES_OFF
Hot reset OFF
Title
Function
Function Name
No.
Function
Specifications
Gets hot reset
PER_GET_HOT_RES
18
|

SEGA Confidential
38
(This page is blank in the original Japanese version.)
|

SEGA Confidential
Saturn System Library User's Guide
39
Backup Library User's Manual
1.0
Guide
1.1 Purpose
In addition to the builit-in memory in this game machine, several types of storage
devices are being planned for storing information during a game.
This library provides functions for reading, writing and searching these backup
storage devices.
1.2 Explanation
1.2.1 Introduction
Always use this library when accessing storage devices for backup.
1.2.2 How to Use This Library
The library itself is compressed and stored in the boot ROM. The application pro-
grammer expands the library and uses it. Expansion is performed by securing a
program expansion area and executing BPU_Init(). Once this is done, each function
can be used.
1.2.3 Storage Capacity
The object of this library is to facilitate access of devices to be supported in the future
through a common interface, and therefore the capacity of the storage devices to be
developed in the future is not known. Also, depending on the device, it will be
divided up into multiple areas. Each one of these unit areas is called a partition (the
capacity of each partition may be different).
When storing data, execute BUP_SelPart() and BUP_Stat() and confirm the capacity
before writing. The built-in backup memory is 32 Kbyte.
1.2.4 Date Setting
In order to preserve the uniqueness of this library, it does not have a function for
acquiring the date and time. Set the date and time data by having the application use
BPU_SetDate().
1.2.5 Precautions
This library will destroy data if writing is interrupted. Before executing BUP_Init(),
BUP_Format(), BUP_Write() and BUP_Delete, disable the reset button by using
PER_SMPC_RES_DIS() in the system library.
|

SEGA Confidential
40
1.3 Program Example
An example of a program written in C is shown below.
#include "sega_per.h"
#define BUP_START_ADDR 0x60????0
/*sets write address for library
*/
#include "sega_bup.h"
Unit32 BackUpRamWork[2048];
main()
[
BupConfig conf[3]
BupStat sttb;
BupDir writetb;
BupDate datatb;
Unit8 *time;
PER_SMPC_RES_DIS();
/*disables reset button
*/
BUP_Init(BUP_START_ADDR, BackUpRamWork, conf);
if(BUP_Stat(0, &sttb)==BUP_UNFORMAT) {
BUP_Format(0);
}
PER_SMPC_RES_ENA();
/*enables reset button
*/
BUP_Stat(0, &sttb);
if(sttb.freeblock > 0) {
strcpy((char *)writetb.filename, "FILE_NAME01");
STRCPY((char *)writetb.comment, "test");
writetb.language = BUP_JAPANESE;
time = PER_GET_TIM();
/*get date and time
*/
datetb.year = (Uint8 )( (Uint16 )(time[6]>>4) * 1000
+ (Uint16 )(time[6] & 0x0F) * 100
+ (Uint16 )(time[5]>>4) * 10
+ (Uint16 )(time[5] & 0x0F) - 1980);
datetb.month = time[4] & 0x0F;
datetb.day = (time[3]>>4)*10 + (time[3] & 0x0F);
datetb.time = (time[2]>>4)*10 + (time[2] & 0x0F);
datetb.min = (time[1]>>4)*10 + (time[1] & 0x0F);
writetb.date = BUP_SetDate(&datetb);
writetb.datasize = 10;
PER_SMPC_RES_DIS();
/*disable reset button
*/
BUP_Write(0, &writetb, "Dummy Data");
PER_SMPC_RES_ENA();
/*enable reset button
*/
|

SEGA Confidential
2.0 Reference
2.1 Data List
Saturn System Library User's Guide
41
Title
Data specification
Data
Storage device connection information
Data Name
BupConfig
No.
typedef struct BupConfig {
Uint16 unit_id;
/*unit ID
*/
Uint16 partition;
/*number of partitions
*/
} BupConfig;
*When unit_id is "0", it indicates non-connection.
Type of device
unit_id
partition
Built-in memory
1
1
External cartridge
2
1
Title
Data specification
Function
Status information
Function Name
BupStat
No.
typedef struct BupStat {
Uint32 totalsize;
/*total capacity (bytes)
*/
Uint32 totalblock;
/*number of blocks
*/
Uint32 blocksize;
/*size of one block (bytes)
*/
Uint32 freesize;
/*open space
*/
Uint32 freeblock;
/*number of open blocks
*/
Uint32 datanum;
/*number of items that can be written
*/
} BupStat;
The value for the size specified by BUP_Stat() for datasize is stored in datanum.
Title
Data specification
Function
Date and time
Function Name
BupDate
No.
typedef struct BupStat {
Uint8 year;
/*year (1980 subtracted from year
*/
Uint8 month;
/*month (1-12)
*/
Uint8 day;
/*day (1-31)
*/
Uint8 time;
/*hour (0-23)
*/
Uint8 min;
/*minute (0-59)
*/
Uint8 week;
/*day of week (sunday 0- saturday 6)
*/
} BupDate;
|

SEGA Confidential
42
Title
Data specification
Function
Directory information
Function Name
BupDir
No.
typedef struct BupStat {
Uint8 filename[12];
/*file name
*/
/*total 12 bytes ASCII 11 characters
+ NUL
*/
Uint8 comment[11];
/*comment
*/
/*total 11 bytes ASCII 10 characters
+ NUL
*/
Uint8 language;
/*language of comment
*/
/* Japanese BUP_JAPANESE
*/
/* English BUP_ENGLISH
*/
/* French BUP_FRACAIS
*/
/* German BUP_DEUTSCH
*/
/* Spanish BUP_ESPAN0L
*/
/* Italian BUP_ITALIANO
*/
Uint32 date;
/*date and time data
*/
Uint32 datasize;
/*data size (unit: byte)
*/
Uint16 blocksize;
/*data size (unit: block)
*/
} BupDir;
2.2 Function List
Function
Function Name
No.
Backup library
Initialize backup library
BUP_Init
1
Select partition
BUP_SelPart
2
Execute format
BUP_Format
3
Get status
BUP_Stat
4
Write data
BUP_Write
5
Read data
BUP_Read
6
Delete data
BUP_Delete
7
Get directory information
BUP_Dir
8
Verify data
BUP_Verify
9
Open date and time data
BUP_GetDate
10
Compress data and time data
BUP_SetDate
11
|

SEGA Confidential
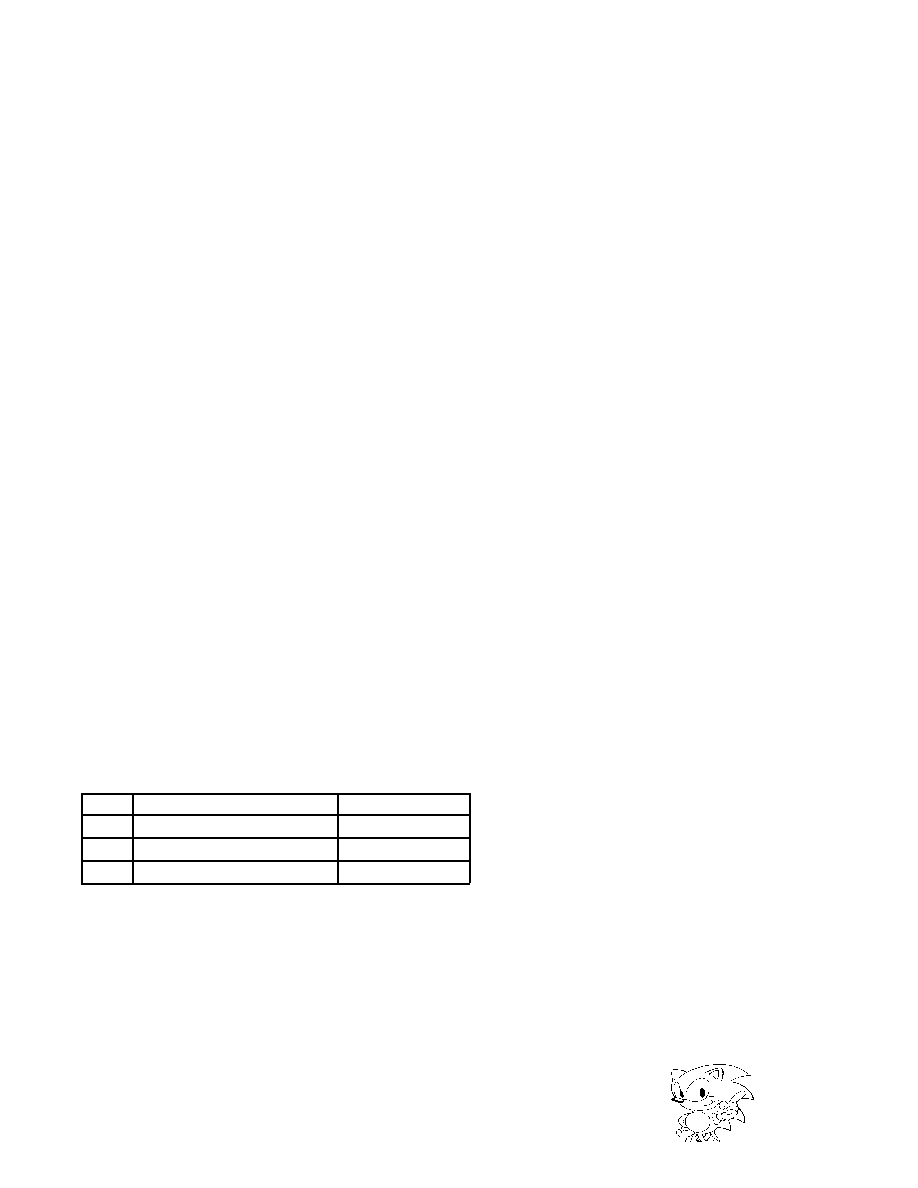
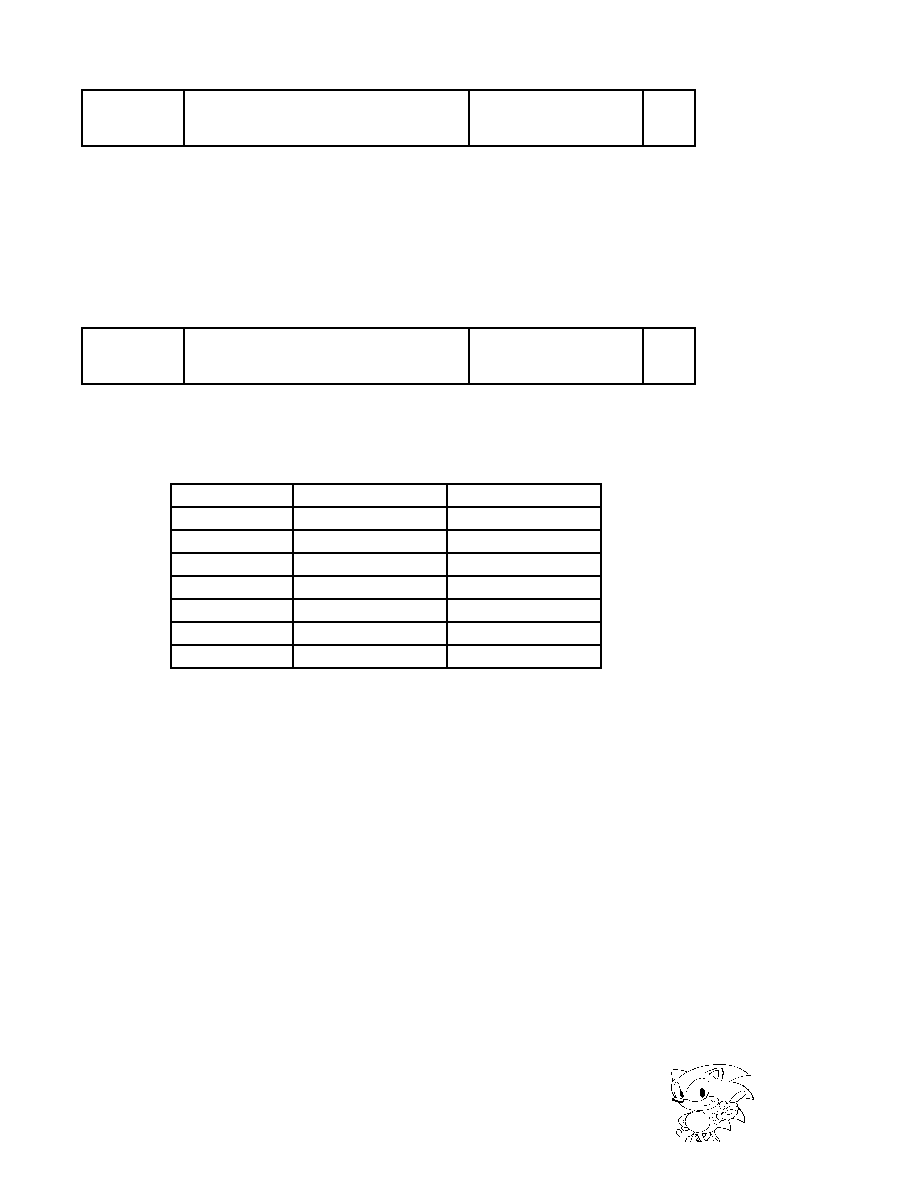
2.3 Data Flow
HOST
Storage device
for backup
Write
Read
2.4 Function Specifications
Format
void BUP_Init(Uint32 *libaddr,Uint32 *workbuff,BupConfig conf[3])
Input
libaddr : specifies address to which library is loaded.
The size of the library is 16 Kbytes.
workbuff : point for library work area
A work area size of 8192 bytes is required.
Long word access may also be performed, so be sure to secure
with Uint32.
Output
conf
: Gets information on the connected storage device.
Function
Loads the backup library to the specified memory area and prepares it
for use. Gets information on the connected storage device.
The following device numbers correspond to three tables.
Notes
Always prepare three storage device connection information tables.
Example
#define BUP_START_ADDR 0x6??????
#include"sega_bup.h"
Uint32 workmemory[2048]
voidsample()
{
BupConfig conf[3]
BUP_Init(BUP_START_ADDR, workmemory, conf);
...............
}
Saturn System Library User's Guide
43
Device No.
Device Type
0
Built-in memory cartridge
1
Memory cartridge or parallel interface
2
Serial interface
Title
Function specification
Function
Initializes backup library
Function Name
BUP_Init
No.
1
|

SEGA Confidential
Format
Sint32 BUP_SelPart(Uint32 device,Uint16 num)
I
nput
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
num
: partition number
0 - (number of partitions - 1)
Output
none
Function value
0
: success
other : failure
Function
Selects a partition. In the initial condition, partition 0 is selected.
Format
Sint32 BUP_Format(Uint32 device)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
Output
none
Function value
0
: success
BUP_WRITE_PROTECT
: write protected
other
: failure
Function
Initializes the backup storage device.
Formats only the current partition in a partitioned backup storage
device.
44
Title
Function specification
Function
Partition selection
Function Name
BUP_SelPart
No.
2
Title
Function specification
Function
Executes format
Function Name
BUP_Format
No.
3
|

SEGA Confidential
Format
Sint32 BUP_Stat(Uint32 device,Uint32 datasize,BupStat
*stat)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
datasize
: specify size of data to be written in byte units
Output
stat
: status information
Function value
returns device status
0
: success
BUP_NON
: not connected
BUP_UNFORMAT
: not formatted
Function
Gets status information.
Format
Sint32 BUP_Write(Uint32 device, BupDir *dir,Uint8 *data,Uint8
owsw)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
dir
: file control information (input other than dir.blocksize)
data : pointer for write data
owsw: overwrite check mode
ON: does not write if file of same name exists
OFF: writes on file if file of same name exists
Output
none
Function value
0
: success
BUP_NON
: not connected
BUP_UNFORMAT
: not formatted
BUP_WRITE_PROTECT
: write protect exists
BUP_FOUND
: file of same name exists
Other
: failure
Function
Writes data to the backup storage device.
Saturn System Library User's Guide
45
Title
Function specification
Function
Gets status
Function Name
BUP_Stat
No.
4
Title
Function specification
Function
Writes data
Function Name
BUP_Write
No.
5
|
SEGA Confidential
Format
Sint32 BUP_Read(Uint32 device, Uint8 *fname, Uint8
*data)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
fname : file name specification (11 characters are required in ASCII)
Output
data : pointer for load destination buffer
Function value 0
: success
BUP_NON
: not connected
BUP_UNFORMAT
: not formatted
BUP_NOT_FOUND
: file not found
BUP_BROKEN
: file is damaged
Other
: failure
Function
Loads data from the backup storage device.
Format
Sint32 BUP_Delete(Uint32 device, Uint8 *fname)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
fname : file name (11 characters is required in ASCII)
Output
none
Function value
0
: success
BUP_NON
: not connected
BUP_UNFORMAT
: not formatted
BUP_NOT_FOUND
: file not found
BUP_WRITE_PROTECT
: write protect exists
Other
: failure
Function
Deletes data on the backup storage device.
46
Title
Function specification
Function
Deletes data
Function Name
BUP_Delete
No.
7
Title
Function specification
Function
Loads data
Function Name
BUP_Read
No.
6
|
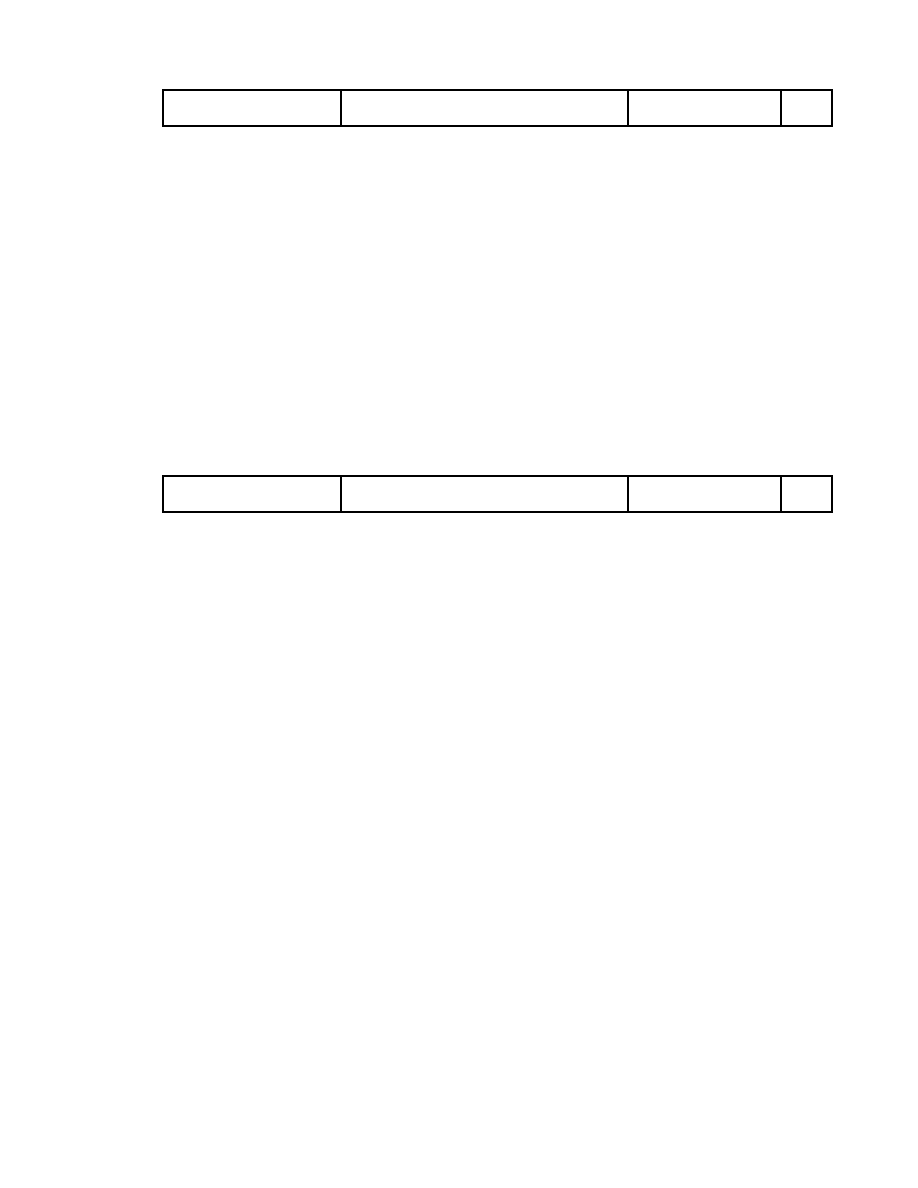
SEGA Confidential
Format
Sint32 BUP_Dir(Uint32 device,Uint8 *fname,Uint16 dirsize, BupDir *dir)
Input
device : device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
fname : file name specification (within 11 ASCII characters)
dirsize : specifies the number of directory info secured
Output
dir
: stores directory information
Function value
number of directory information hits
Function
The file name is done by searching forward, and the directory infor-
mation is stored in a table. The number of directories hit by the search
is returned as the function value. If negative, it indicates that the table
is too small, and the number of hits can be confirmed by inverting the
sign (if the result is 11 when the tbsize is set to 10 and a search is
performed, -11 is returned).
Format
Sint32 BUP_Verify(Uint32 device, Uint8 *filename,Uint8
*data)
Input
device
: device number
0: built-in memory
1: memory cartridge or parallel interface
2: serial interface
filename
: file name (11 characters are required in ASCII)
data
: pointer for data verification
Output
none
Function value
0
: success
BUP_NON
: not connected
BUP_UNFORMAT
: not formatted
BUP_NO_MATCH
: data do not agree
BUP_NOT_FOUND : file not found
BUP_BROKEN
: file is damaged
Function
Verifies data written to the backup file.
Saturn System Library User's Guide
47
Title
Function specification
Function
Gets directory information
Function Name
BUP_Dir
No.
8
Title
Function specification
Function
Verify data
Function Name
BUP_Verify
No.
9
|
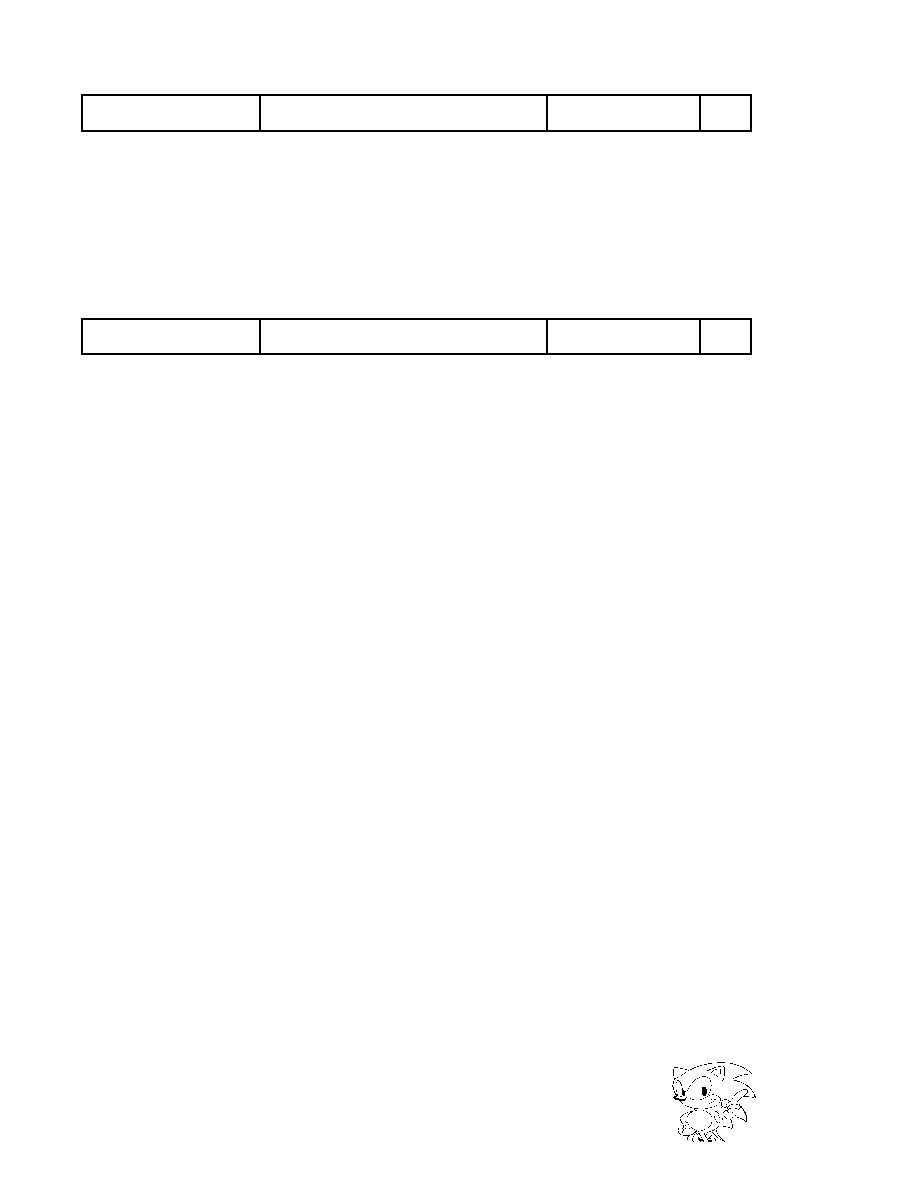
SEGA Confidential
Format
void BUP_GetDate(Uint32 pdate,BupDate *date)
Input
pdate : data and time data of directory information
date
: date and time table
Output
none
Function value
none
Function
Expands the date and time data in the directory information table.
Format
Uint32 BUP_SetDate(BupDate *date)
Input
date : date and time table
Output
none
Function value
Data in date and time data form in the directory information table.
Function
Compresses the date and time data in the directory information table.
48
Title
Function specification
Function
Compress date and time data
Function Name
BUP_SetDate
No.
11
Title
Function specification
Function
Expands data and time data
Function Name
BUP_GetDate
No.
10
|